Estimation Filters
Sensor Fusion and Tracking Toolbox™ provides estimation filters that are optimized for specific scenarios, such as linear or nonlinear motion models, linear or nonlinear measurement models, or incomplete observability.
Functions
Topics
- Introduction to Estimation Filters
General review of estimation filters provided in the toolbox.
- Linear Kalman Filters
Estimate and predict object motion using a Linear Kalman filter.
- Extended Kalman Filters
Estimate and predict object motion using an extended Kalman filter.
- Introduction to Out-of-Sequence Measurement Handling
Definition of out-of-sequence measurement and techniques of handling OOSM.
- Motion Model, State, and Process Noise
Introduce kinematic motion model, state, and process noise conventions.
- Generate Code with Strict Single-Precision and Non-Dynamic Memory Allocation
Introduce functions, objects, and blocks that support strict single-precision and non-dynamic memory allocation code generation in Sensor Fusion and Tracking Toolbox.
Featured Examples
Tracking Maneuvering Targets
Track maneuvering targets using various tracking filters. The example shows the difference between filters that use a single motion model and multiple motion models.
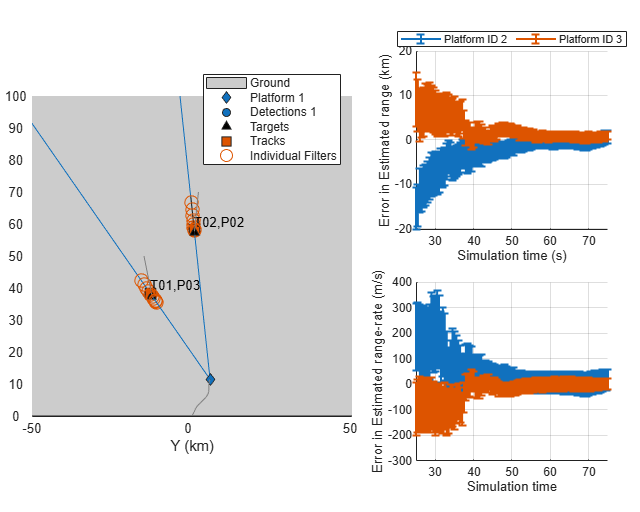
Tracking with Range-Only Measurements
Illustrates the use of particle filters and Gaussian-sum filters to track a single object using range-only measurements.

Track Objects with Wrapping Azimuth Angles and Ambiguous Range and Range Rate Measurements
Track objects when measurements wrap in angle, range, or range rate.
Passive Ranging Using a Single Maneuvering Sensor
Illustrates how to track targets using passive angle-only measurements from a single sensor. Passive angle-only measurements contain azimuth and elevation of a target with respect to the sensor. The absence of range measurements makes the problem challenging as the targets to be tracked are fully observable only under certain conditions.

Handle Out-of-Sequence Measurements with Filter Retrodiction
Handle out-of-sequence measurements using the retrodiction technique at the filter level.

Smooth Trajectory Estimation of trackingIMM Filter
Smooth state estimates of a target using the smooth object function. Smoothing is a technique to refine previous state estimates using the up-to-date measurements and the state estimate information. In this example, you will learn how to improve previously corrected estimates from an Interacting Multi-Model (IMM) filter by running a backward recursion, which produces smoothed and more accurate state estimates. In the first section, you implement a smooth algorithm to smooth the trajectory of a turning car. In the remainder of this example, you perform smoothing on several highly maneuvering aircraft trajectories, taken from the Benchmark Trajectories for Multi-Object Tracking example**.**
Tuning Kalman Filter to Improve State Estimation
Tune process noise and measurement noise of a constant velocity Kalman filter.
Automatically Tune Tracking Filter for Multi-Object Tracker
Tune a tracking filter and improve the tracking performance of the tracker.

Automatically Tune Filter to Track Maneuvering Targets
Tune a tracking filter to track maneuvering targets.

Analyze Truth Data and Define Truth Model
Analyze recorded truth data to model the motion of truth objects and configure a filter to track them.