Visual SLAM
Visual simultaneous localization and mapping (vSLAM) is the process of estimating the position and orientation of a camera while simultaneously building a map of its environment using visual inputs. Computer Vision Toolbox™ supports vSLAM workflows for monocular, RGB-D, and stereo cameras, with optional inertial sensor fusion for improved accuracy. These capabilities are essential for applications in robotics, augmented reality, and autonomous navigation. For guidance on choosing a vSLAM workflow, see Choose SLAM Workflow Based on Sensor Data.
Each visual SLAM object—monovslam, rgbdvslam, and stereovslam—provides ready-to-use tools to add frames, track
keyframes, compute 3-D map points, estimate camera poses, close loops, and
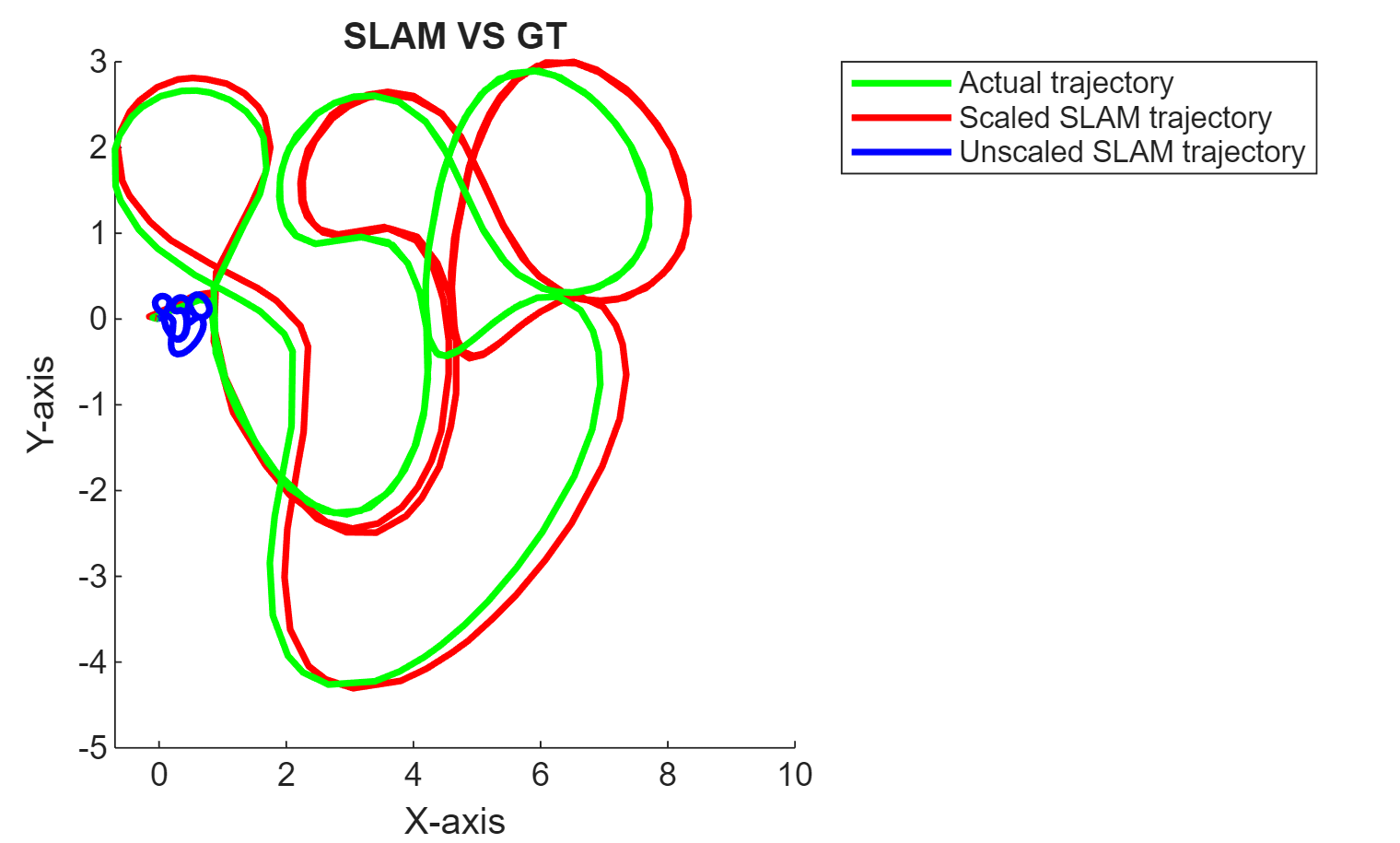
visualize data throughout the camera trajectory. You can also evaluate the
performance of the vSLAM algorithm by comparing the estimated camera trajectory
to the ground truth using the compareTrajectories function. The toolbox also provides
functionality for building your own visual SLAM pipeline.
You can use the toolbox to perform code generation and deployment of vSLAM algorithms. For more information, see Build and Deploy Visual SLAM Algorithm with ROS in MATLAB and Performant and Deployable Monocular Visual SLAM.
Functions
Topics
Ready-To-Use Visual SLAM Functions
- Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code. - Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time. (Since R2025a) - Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features. - How to Improve Accuracy in Visual SLAM
Tips to improve the accuracy, robustness, and efficiency of your visual SLAM system.
Build Your Own Visual SLAM Pipeline
- Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM). - Monocular Visual-Inertial SLAM
Perform SLAM by combining images captured by a monocular camera with measurements from an IMU sensor. - Stereo Visual Simultaneous Localization and Mapping
Process image data from a stereo camera to build a map of an outdoor environment and estimate the trajectory of the camera.
Featured Examples

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time.

Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement and generate C ++ code for a vSLAM algorithm that estimates poses for the TUM RGB-D Benchmark and deploy as an ROS node to a remote device.

Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Simulates an RGB-D visual simultaneous localization and mapping (SLAM) system to estimate the camera poses using data from a mobile robot in Gazebo.

Stereo Visual SLAM for UAV Navigation in 3D Simulation
Develop a visual SLAM algorithm for a UAV equipped with a stereo camera.

Monocular Visual Odometry
Determine location and orientation of a camera by analyzing a sequence of images.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine® simulation environment.

Estimate Camera-to-IMU Transformation Using Extrinsic Calibration
Estimate SE(3) transformation to define spatial relationship between camera and IMU.

Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from the Unreal Engine® simulation environment.