poses
Description
[
returns the IDs camPoses,keyFrameIDs] = poses(vslam)keyFrameIDs of the key frames corresponding to the
camera poses. The IDs represent the order in which the image frames have been added to the
vslam object by the addFrame object
function.
Examples
Perform RGB-D visual simultaneous localization and mapping (vSLAM) using the data from the TUM RGB-D Benchmark. You can download the data to a temporary directory using a web browser or by running this code:
baseDownloadURL = "https://vision.in.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir,"tum_rgbd_dataset",filesep); options = weboptions(Timeout=Inf); tgzFileName = dataFolder+"fr3_office.tgz"; folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder) disp("Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.") websave(tgzFileName,baseDownloadURL,options); % Extract contents of the downloaded file disp("Extracting fr3_office.tgz (1.38 GB) ...") untar(tgzFileName,dataFolder); end
Create two imageDatastore objects. One to store the color images and the other to store the depth images.
colorImageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/rgb/"; depthImageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/depth/"; imdsColor = imageDatastore(colorImageFolder); imdsDepth = imageDatastore(depthImageFolder);
Select the synchronized pair of color and depth images.
data = load("rgbDepthPairs.mat");
imdsColor=subset(imdsColor, data.indexPairs(:, 1));
imdsDepth=subset(imdsDepth, data.indexPairs(:, 2));Specify your camera intrinsic parameters, and use them to create an RGB-D visual SLAM object.
intrinsics = cameraIntrinsics([535.4 539.2],[320.1 247.6],[480 640]); depthScaleFactor = 5000; vslam = rgbdvslam(intrinsics,depthScaleFactor);
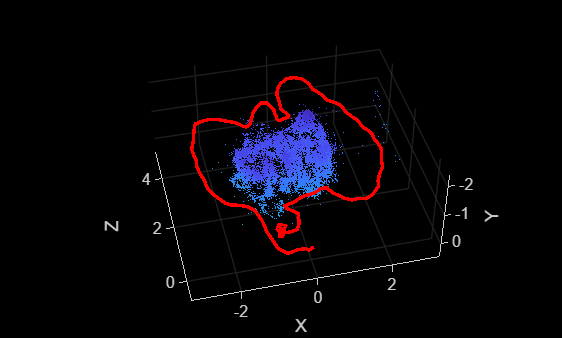
Process each pair of color and depth images, and visualize the camera poses and 3-D map points.
for i = 1:numel(imdsColor.Files) colorImage = readimage(imdsColor,i); depthImage = readimage(imdsDepth,i); addFrame(vslam,colorImage,depthImage); if hasNewKeyFrame(vslam) % Query 3-D map points and camera poses xyzPoints = mapPoints(vslam); [camPoses,viewIds] = poses(vslam); % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); % Stop adding frames when tracking is lost if status == uint8(0) break end end
Once all the frames have been processed, reset the system.
while ~isDone(vslam) plot(vslam); end

reset(vslam);
Input Arguments
Output Arguments
Version History
Introduced in R2024a
See Also
Objects
Functions
addFrame|hasNewKeyFrame|checkStatus|isDone|mapPoints|plot|reset