cheby2
Chebyshev Type II filter design
Syntax
Description
[
designs an b,a] = cheby2(n,Rs,Ws)nth-order lowpass digital Chebyshev Type II
filter with normalized stopband edge frequency Ws and
Rs decibels of stopband attenuation down from the peak
passband value. The cheby2 function returns the
numerator and denominator coefficients of the filter transfer function.
[
designs a lowpass, highpass, bandpass, or bandstop digital Chebyshev
Type II filter, depending on the value of b,a] = cheby2(n,Rs,Ws,fType)fType and
the number of elements of Ws. The resulting bandpass and
bandstop designs are of order 2n.
Note
You might encounter numerical instabilities when designing IIR filters with transfer functions for orders as low as 4. See Transfer Functions and CTF for more information about numerical issues that affect forming the transfer function.
[
designs a digital Chebyshev Type II filter and returns its zeros, poles,
and gain. This syntax can include any of the input arguments in previous
syntaxes.z,p,k] = cheby2(___)
[___] = cheby2(___,"s") designs
an analog Chebyshev Type II filter using any of the input or output
arguments in previous syntaxes.
[
designs a lowpass digital Chebyshev Type II filter using second-order Cascaded Transfer Functions
(CTF). The function returns matrices that list the denominator and numerator
polynomial coefficients of the filter transfer function, represented as a
cascade of filter sections. This approach generates IIR filters with improved
numerical stability compared to single-section transfer functions. (since R2024b)B,A] = cheby2(n,Rs,Ws,"ctf")
[___] = cheby2(
designs a lowpass, highpass, bandpass, or bandstop digital Chebyshev
Type II filter, and returns the filter representation using the CTF format.
The resulting design sections are of order 2 (lowpass and highpass filters) or 4
(bandpass and bandstop filters). (since R2024b)n,Rs,Ws,fType,"ctf")
[___,
also returns the overall gain of the system. You must specify
gS] = cheby2(___)"ctf" to return gS. (since R2024b)
Examples
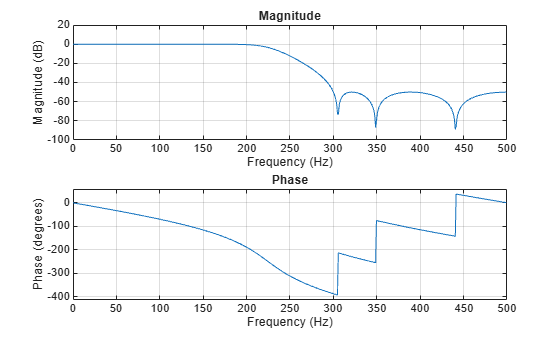
Design a 6th-order lowpass Chebyshev Type II filter with 50 dB of stopband attenuation and a stopband edge frequency of 300 Hz, which, for data sampled at 1000 Hz, corresponds to rad/sample. Plot its magnitude and phase responses. Use it to filter a 1000-sample random signal.
fc = 300; fs = 1000; [b,a] = cheby2(6,50,fc/(fs/2)); freqz(b,a,[],fs) subplot(2,1,1) ylim([-100 20])
dataIn = randn(1000,1); dataOut = filter(b,a,dataIn);
Design a 6th-order Chebyshev Type II bandstop filter with normalized edge frequencies of and rad/sample and 50 dB of stopband attenuation. Plot its magnitude and phase responses. Use it to filter random data.
[b,a] = cheby2(3,50,[0.2 0.6],'stop');
freqz(b,a)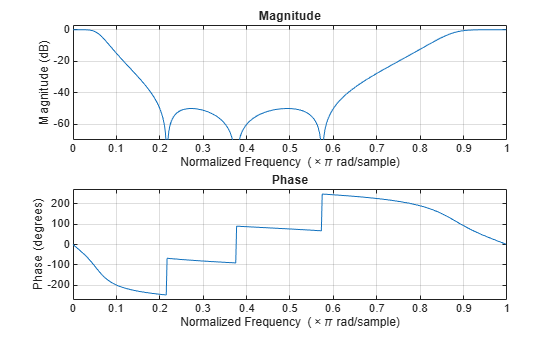
dataIn = randn(1000,1); dataOut = filter(b,a,dataIn);
Design a 9th-order highpass Chebyshev Type II filter with 20 dB of stopband attenuation and a stopband edge frequency of 300 Hz, which, for data sampled at 1000 Hz, corresponds to rad/sample. Convert the zeros, poles, and gain to second-order sections. Plot the magnitude and phase responses.
[z,p,k] = cheby2(9,20,300/500,"high");
sos = zp2sos(z,p,k);
freqz(sos)
subplot(2,1,1)
ylim([-60 10])
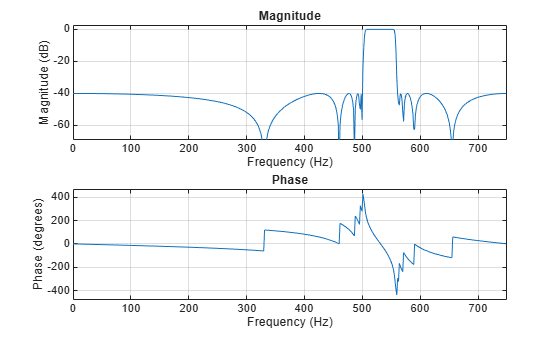
Design a 20th-order Chebyshev Type II bandpass filter with a lower stopband frequency of 500 Hz and a higher stopband frequency of 560 Hz. Specify a stopband attenuation of 40 dB and a sample rate of 1500 Hz. Use the state-space representation.
fs = 1500; [A,B,C,D] = cheby2(10,40,[500 560]/(fs/2));
Convert the state-space representation to second-order sections. Visualize the frequency responses.
sos = ss2sos(A,B,C,D); freqz(sos,[],fs)
Design an identical filter using designfilt. Visualize the frequency responses.
d = designfilt("bandpassiir",FilterOrder=20, ... StopbandFrequency1=500,StopbandFrequency2=560, ... StopbandAttenuation=40,SampleRate=fs); freqz(d,[],fs)

Design a fifth-order analog Butterworth lowpass filter with a cutoff frequency of 2 GHz. Multiply by to convert the frequency to radians per second. Compute the frequency response of the filter at 4096 points.
n = 5;
wn = 2*pi*2e9;
w = 2*pi*1e9*logspace(-2,1,4096)';
[zb,pb,kb] = butter(n,wn,"s");
[bb,ab] = zp2tf(zb,pb,kb);
[hb,wb] = freqs(bb,ab,w);
gdb = -diff(unwrap(angle(hb)))./diff(wb);Design a fifth-order Chebyshev Type I filter with a passband edge frequency of 2 GHz and 3 dB of passband ripple. Compute its frequency response.
wp = wn;
[z1,p1,k1] = cheby1(n,3,wp,"s");
[b1,a1] = zp2tf(z1,p1,k1);
[h1,w1] = freqs(b1,a1,w);
gd1 = -diff(unwrap(angle(h1)))./diff(w1);Design a fifth-order Chebyshev Type II filter with a stopband edge frequency of 2.5 GHz and 30 dB of stopband attenuation. Compute its frequency response.
ws = 2*pi*2.5e9;
[z2,p2,k2] = cheby2(n,30,ws,"s");
[b2,a2] = zp2tf(z2,p2,k2);
[h2,w2] = freqs(b2,a2,w);
gd2 = -diff(unwrap(angle(h2)))./diff(w2);Design a fifth-order elliptic filter with the same passband and stopband edge frequencies, 3 dB of passband ripple, and 30 dB of stopband attenuation. Compute its frequency response.
[ze,pe,ke] = ellip(n,3,30,wp,"s");
[be,ae] = zp2tf(ze,pe,ke);
[he,we] = freqs(be,ae,w);
gde = -diff(unwrap(angle(he)))./diff(we);Design a fifth-order Bessel filter with the same edge frequency. Compute its frequency response.
[zf,pf,kf] = besself(n,wn); [bf,af] = zp2tf(zf,pf,kf); [hf,wf] = freqs(bf,af,w); gdf = -diff(unwrap(angle(hf)))./diff(wf);
Plot the attenuation in decibels. Express the frequency in gigahertz. Compare the filters.
fGHz = [wb w1 w2 we wf]/(2e9*pi); plot(fGHz,mag2db(abs([hb h1 h2 he hf]))) axis([0 5 -45 5]) grid on xlabel("Frequency (GHz)") ylabel("Attenuation (dB)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"], ... Location="southwest")

The Butterworth and Chebyshev Type II filters have flat passbands and wide transition bands. The Chebyshev Type I and elliptic filters roll off faster but have passband ripple. The frequency input to the Chebyshev Type II design function sets the beginning of the stopband rather than the end of the passband. Elliptic filters offer steeper rolloff characteristics than Butterworth and Chebyshev filters, but they are equiripple in both the passband and the stopband. Of these four classical filter types, elliptic filters usually meet a given set of filter performance specifications with the lowest filter order.
Plot the group delay in samples. Express the frequency in gigahertz and the group delay in nanoseconds. Compare the filters. The Bessel filter has approximately constant group delay along the passband.
gdns = [gdb gd1 gd2 gde gdf]*1e9; gdns(gdns<0) = NaN; loglog(fGHz(2:end,:),gdns) grid on xlabel("Frequency (GHz)") ylabel("Group delay (ns)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"], ... Location="southwest")

Design a ninth-order highpass Chebyshev Type II filter with a cutoff frequency of 300 Hz and sampling rate of 1000 Hz. The stopband attenuation is 40 dB. Return the coefficients of the filter system as a cascade of second-order sections.
Wn = 300/(1000/2); [B,A] = cheby2(9,40,Wn,"high","ctf")
B = 5×3
0.5196 -0.5196 0
0.5196 -0.6621 0.5196
0.5196 -0.1266 0.5196
0.5196 0.1806 0.5196
0.5196 0.3066 0.5196
A = 5×3
1.0000 -0.0765 0
1.0000 -0.0238 0.0967
1.0000 0.2707 0.3142
1.0000 0.5763 0.5726
1.0000 0.8128 0.8461
Plot the magnitude response of the filter.
filterAnalyzer(B,A)

Input Arguments
Output Arguments
More About
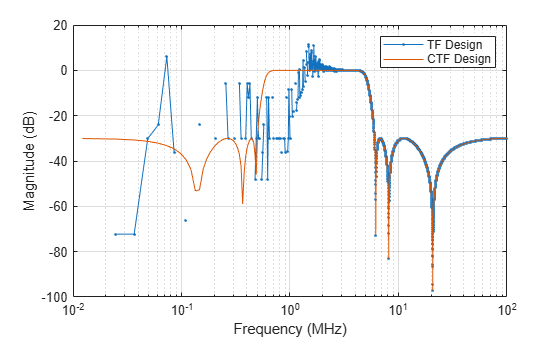
Numerical Instability of Transfer Function Syntax
In general, use cascaded transfer functions ("ctf" syntaxes) to design IIR digital filters. If you design the filter using transfer functions (any of the [b,a] syntaxes), you might encounter numerical instabilities. These instabilities are due to round-off errors and can occur for an order n as low as 4. This example illustrates this limitation.
n = 6; Rs = 30; Fs = 200e6; Wn = [0.5e6 6e6]/(Fs/2); ftype = "bandpass"; % Transfer Function (TF) design [b,a] = cheby2(n,Rs,Wn,ftype); % This is an unstable filter % CTF design [B,A] = cheby2(n,Rs,Wn,ftype,"ctf"); % Compare frequency responses [hTF,f] = freqz(b,a,8192,Fs); hCTF = freqz(B,A,8192,Fs); semilogx(f/1e6,db(hTF),".-",f/1e6,db(hCTF)) grid on legend(["TF Design" "CTF Design"]) xlabel("Frequency (MHz)") ylabel("Magnitude (dB)")
Algorithms
Chebyshev Type II filters are monotonic in the passband and equiripple in the stopband. Type II filters do not roll off as fast as Type I filters, but are free of passband ripple.
cheby2 uses a five-step algorithm:
It finds the lowpass analog prototype poles, zeros, and gain using the function
cheb2ap.It converts poles, zeros, and gain into state-space form.
If required, it uses a state-space transformation to convert the lowpass filter into a bandpass, highpass, or bandstop filter with the desired frequency constraints.
For digital filter design, it uses
bilinearto convert the analog filter into a digital filter through a bilinear transformation with frequency prewarping. Careful frequency adjustment the analog filters and the digital filters to have the same frequency response magnitude atWsorw1andw2.It converts the state-space filter back to transfer function or zero-pole-gain form, as required.
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.