sparss
Sparse first-order state-space model
Description
Use sparss to represent sparse descriptor state-space models
using matrices obtained from your finite element analysis (FEA) package. FEA involves the
concept of dynamic substructuring where a mechanical system is partitioned into components
that are modeled separately. These components are then coupled using rigid or semi-rigid
physical interfaces that express consistency of displacements and equilibrium of internal
forces. The resultant matrices from this type of modeling are quite large with a sparse
pattern. Hence, using sparss is an efficient way to represent such large
sparse state-space models in MATLAB® to perform linear analysis. You can also use sparss to
convert a second-order mechss model object to a sparss
object.
You can use sparss model objects to represent SISO or MIMO state-space
models in continuous time or discrete time. In continuous time, a first-order sparse
state-space model is represented in the following form:
Here, x, u and y
represent the states, inputs and outputs respectively, while A,
B, C, D and E
are the state-space matrices. The sparss object represents a state-space
model in MATLAB storing sparse matrices A, B,
C, D and E along with other
information such as sample time, names and delays specific to the inputs and outputs.
You can use a sparss object to:
Perform time-domain and frequency-domain response analysis.
Specify signal-based connections with other LTI models.
Transform models between continuous-time and discrete-time representations.
Find low-order approximations of large sparse models.
For more information, see Sparse Model Basics.
Creation
Syntax
Description
sys = sparss(A,B,C,D,E)
For instance, consider a plant with Nx states,
Ny outputs, and Nu inputs. The first-order
state-space matrices are:
Ais the sparse state matrix withNx-by-Nxreal- or complex-values.Bis the sparse input-to-state matrix withNx-by-Nureal- or complex-values.Cis the sparse state-to-output matrix withNy-by-Nxreal- or complex-values.Dis the sparse gain or input-to-output matrix withNy-by-Nureal- or complex-values.Eis the sparse mass matrix with the same size as matrixA. WhenEis omitted,sparsspopulatesEwith an identity matrix.
sys = sparss(___,PropertyName=Value)
Input Arguments
Output Arguments
Properties
Object Functions
The following lists show functions you can use with sparss model
objects.
Examples
For this example, consider sparseFOContinuous.mat which contains sparse matrices for a continuous-time sparse first-order state-space model.
Extract the sparse matrices from sparseFOContinuous.mat.
load('sparseFOContinuous.mat','A','B','C','D','E');
Create the sparss model object.
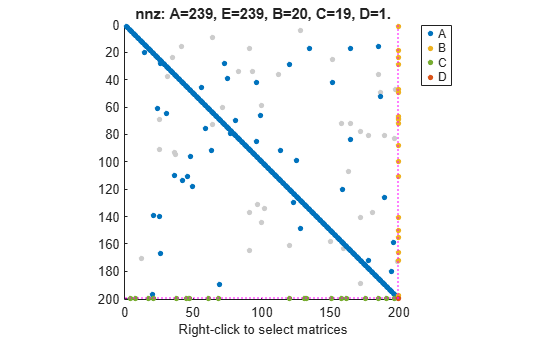
sys = sparss(A,B,C,D,E)
Sparse continuous-time state-space model with 1 outputs, 1 inputs, and 199 states. Model Properties Use "spy" and "showStateInfo" to inspect model structure. Type "help sparssOptions" for available solver options for this model.
The output sys is a continuous-time sparss model object with 199 states, 1 input and 1 output.
You can use the spy command to visualize the sparsity of the sparss model object.
spy(sys)
For this example, consider sparseFODiscrete.mat which contains sparse matrices for a discrete-time sparse first-order state-space model.
Extract the sparse matrices from sparseFODiscrete.mat.
load('sparseFODiscrete.mat','A','B','C','D','E','ts');
Create the sparss model object.
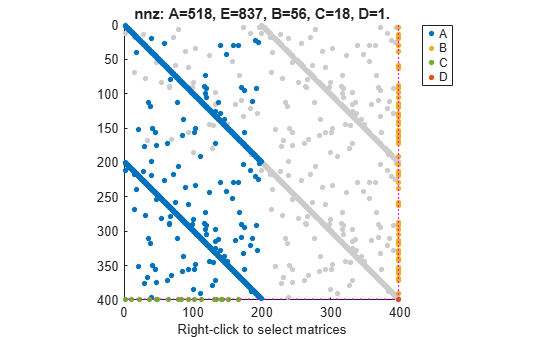
sys = sparss(A,B,C,D,E,ts)
Sparse discrete-time state-space model with 1 outputs, 1 inputs, and 398 states. Model Properties Use "spy" and "showStateInfo" to inspect model structure. Type "help sparssOptions" for available solver options for this model.
The output sys is a discrete-time sparss model object with 398 states, 1 input and 1 output.
You can use the spy command to visualize the sparsity of the sparss model object.
spy(sys)
You can also view model properties of the sparss model object.
properties('sparss')Properties for class sparss:
A
B
C
D
E
Offsets
Scaled
StateInfo
SolverOptions
InternalDelay
InputDelay
OutputDelay
InputName
InputUnit
InputGroup
OutputName
OutputUnit
OutputGroup
Notes
UserData
Name
Ts
TimeUnit
SamplingGrid
Create a static gain MIMO sparse first-order state-space model.
Consider the following three-input, two-output static gain matrix:
Specify the gain matrix and create the static gain sparse first-order state-space model.
D = [1,5,7;6,3,9]; sys = sparss(D); size(sys)
Sparse state-space model with 2 outputs, 3 inputs, and 0 states.
For this example, consider mechssModel.mat that contains a mechss model object ltiSys.
Load the mechss model object from mechssModel.mat.
load('mechssModel.mat','ltiSys'); ltiSys
Sparse continuous-time second-order model with 1 outputs, 1 inputs, and 872 degrees of freedom. Model Properties Use "spy" and "showStateInfo" to inspect model structure. Type "help mechssOptions" for available solver options for this model.
Use the sparss command to convert to first-order sparse representation.
sys = sparss(ltiSys)
Sparse continuous-time state-space model with 1 outputs, 1 inputs, and 1744 states. Model Properties Use "spy" and "showStateInfo" to inspect model structure. Type "help sparssOptions" for available solver options for this model.
The resultant sparss model object sys has exactly double the number of states than the mechss object ltisys since the mass matrix M is full rank. If the mass matrix is not full rank then the number of states in the resultant sparss model when converting from a mechss model is between n and 2n. Here, n is the number of nodes in the mechss model object.
For this example, consider sparseFOSignal.mat that contains a sparse first-order model. Define an actuator, sensor, and controller and connect them together with the plant in a feedback loop.
Load the sparse matrices and create the sparss object.
load sparseFOSignal.mat plant = sparss(A,B,C,D,E,'Name','Plant');
Next, create an actuator and sensor using transfer functions.
act = tf(1,[1 2 3],'Name','Actuator'); sen = tf(1,[6 7],'Name','Sensor');
Create a PID controller object for the plant.
con = pid(1,1,0.1,0.01,'Name','Controller');
Use the feedback command to connect the plant, sensor, actuator, and controller in a feedback loop.
sys = feedback(sen*plant*act*con,1)
Sparse continuous-time state-space model with 1 outputs, 1 inputs, and 29 states. Model Properties Use "spy" and "showStateInfo" to inspect model structure. Type "help sparssOptions" for available solver options for this model.
The resultant system sys is a sparss object since sparss objects take precedence over tf and PID model object types.
Use showStateInfo to view the component and signal groups.
showStateInfo(sys)
The state groups are:
Type Name Size
-------------------------------
Component Sensor 1
Component Plant 20
Signal 1
Component Actuator 2
Signal 1
Component Controller 2
Signal 1
Signal 1
Use xsort to sort the components and signals, and then view the component and signal groups.
sysSort = xsort(sys); showStateInfo(sysSort)
The state groups are:
Type Name Size
-------------------------------
Component Sensor 1
Component Plant 20
Component Actuator 2
Component Controller 2
Signal 4
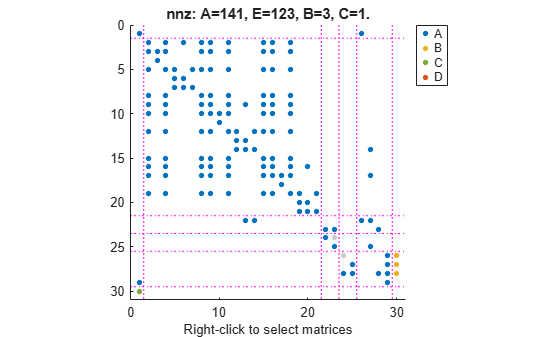
Observe that the components are now ordered before the signal partition. The signals are now sorted and grouped together in a single partition.
You can also visualize the sparsity pattern of the resultant system using spy.
spy(sysSort)
References
[1] M. Hosea and L. Shampine. "Analysis and implementation of TR-BDF2." Applied Numerical Mathematics, vol. 20, no. 1-2, pp. 21-37, 1996.
Version History
Introduced in R2020bSee Also
sparssdata | mechss | showStateInfo | xsort | full | getx0 | spy | Descriptor
State-Space (Simulink)