Descriptor State-Space
Model continuous linear system as system of implicit state-space equations

Libraries:
Simulink /
Continuous
Description
The Descriptor State-Space block models a continuous linear system as a system of differential equations expressed in the implicit form:
where:
x is the state vector.
u is the input vector.
y is the output vector.
The matrices E, A, B, C, and D contain the coefficients of the terms in the system equations.
You can use the Descriptor State-Space block to model both time invariant and time variant linear implicit systems.
To model time invariant systems, specify the E, A, B, C, and D parameters as constant matrices.
To model time variant systems, tune the A, B, C, D, and E parameters during simulation. (since R2026a)
Specify System Matrices
To model your system, specify the system matrices using the E, A, B, C, and D parameters. You can specify either sparse or full matrices. By default, MATLAB® creates full matrices.
For more information, see Constructing Sparse Matrices.
The number of states, inputs, and outputs in the system determine the dimensions of the system matrices.
E — n-by-n, where n is the number of states in the system.
A — n-by-n, where n is the number of states in the system.
B — n-by-m, where:
n is the number of states in the system.
m is the number of system inputs.
C — r-by-n, where:
r is the number of system outputs.
n is the number of states in the system.
D — r-by-m, where:
r is the number of system outputs.
m is the number of system inputs.
Examples

Model a Series RLC Circuit
Model a series RLC circuit while avoiding algebraic loops by using the Descriptor State-Space block.
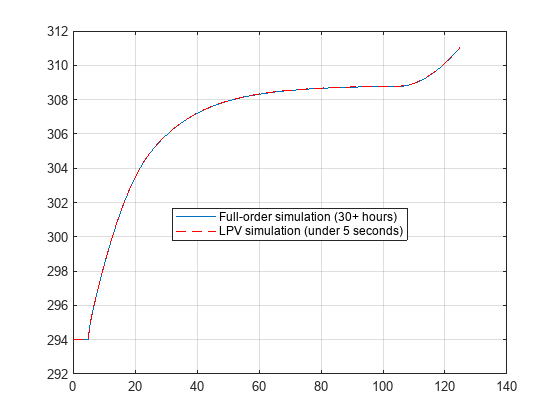
Create Low-Order LPV Model of CPU and Heat Sink Model
Obtain a low-order linear parameter-varying (LPV) surrogate for the high-fidelity finite element model of the heat sink.

Reduced-Order Modeling Technique for System-Level Simulation of Aircraft Wing Spar
Run system-level simulations by using the Descriptor State-Space block to implement a reduced-order model of the I-beam in an aircraft wing spar.