LPV and LTV Models
Create, manipulate, analyze, and simulate linear parameter-varying (LPV) and linear time-varying models (LTV). These models can approximate nonlinear systems and allow you to efficiently apply linear design techniques to nonlinear models.
With the available functionality, you can:
Create LPV or LTV models from mathematical expressions.
Create LPV or LTV models that interpolate linearization results over a grid of operating conditions.
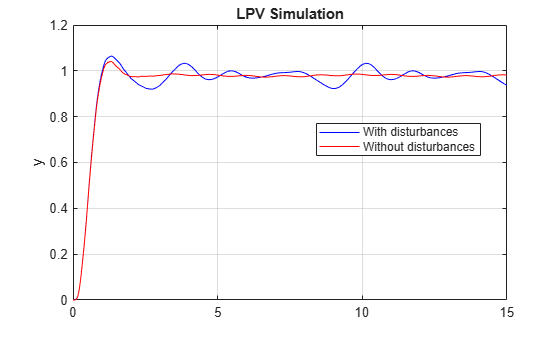
Simulate time response.
Specify signal-based connections between varying models and with LTI models.
Sample dynamics over a grid of parameters to obtain local LTI approximations.
Discretize and resample LPV or LTV models.
Functions
Blocks
Topics
LTV and LPV Model Basics
- LTV and LPV Modeling
Fundamentals of linear time-varying and parameter-varying models. - Using LTV and LPV Models in MATLAB and Simulink
Create, analyze, and simulate linear parameter-varying and linear time-varying state-space models.
Using Analytic LTV and LPV Models
- LPV Model of Bouncing Ball
Construct an LPV representation of a system that exhibits multi-mode dynamics. - LPV Model of Engine Throttle
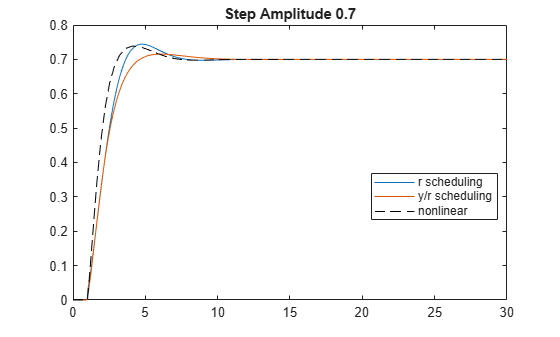
Model engine throttle behavior as a linear parameter-varying system. - Analysis of Gain-Scheduled PI Controller
Analyze gain-scheduled PI control of an LPV system. - LPV Model of Magnetic Levitation System
Create analytic LPV model from linearized equations of magnetic levitation system. - Gain-Scheduled LQG Controller
Demonstrate instability in gain-scheduled control when parameters vary too quickly.
Using Gridded LTV and LPV Models
- LPV Approximation of Boost Converter Model
Obtain linear parameter-varying approximation of a nonlinear Simscape™ Electrical™ model. - Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model. - LPV Model of Magnetic Levitation Model from Batch Linearization Results
Create a gridded LPV model from batch linearization results of a magnetic levitation model. - Reduced Order Modeling of a Nonlinear Dynamical System as an Identified Linear Parameter Varying Model (System Identification Toolbox)
Identify a linear parameter varying reduced order model of a cascade of nonlinear mass-spring-damper systems.
Featured Examples
Control Design for Spinning Disks
Design a gain-scheduled H2 controller for a coupled-spinning disks model.

LTV Model of Two-Link Robot
Obtain a linear time-varying state-space model of a two-link robot along a trajectory.
Hidden Couplings in Gain-Scheduled Control
Demonstrate hidden couplings in gain-scheduled control.
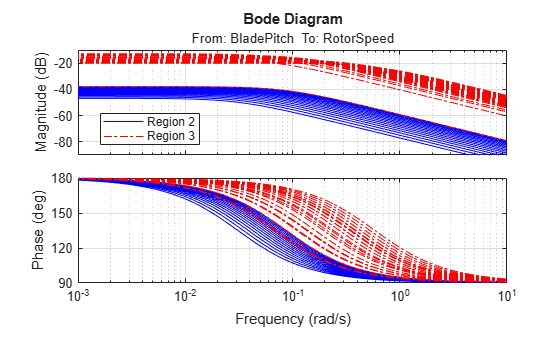
Control Design for Wind Turbine
Design a gain-scheduled controller for a linear parameter-varying model of wind turbine.
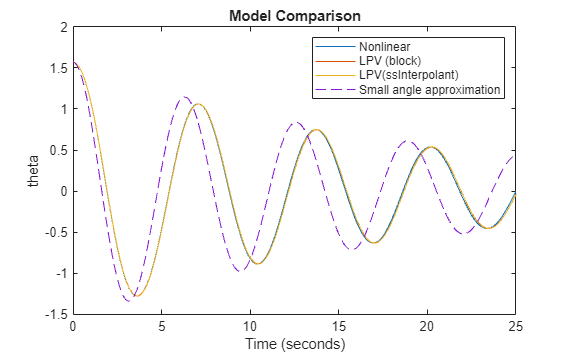
Create LPV Pendulum Model Using Batch Linearization
Create LPV model of Pendulum Using batch linearization results.