LPV Model of Bouncing Ball
This example shows how to construct a linear parameter-varying (LPV) representation of a system that exhibits multi-mode dynamics using lpvss.
The function BouncingBallDF defines the dynamics of this system. For more information on this model, see Using LTI Arrays for Simulating Multi-Mode Dynamics.
Define uncompressed spring lengths a1 and a2 and initial mass heights h1 and h2.
a1 = 12; % uncompressed length of spring 1 (mm) a2 = 20; % uncompressed length of spring 2 (mm) h1 = 100; % initial height of mass m1 (mm) h2 = a2; % initial height of mass m2 (mm)
Moderate Floor Stiffness
First simulate the response for a soft surface by setting the spring constant for the second mass k2 to 300 g/s^2. The state is .
The input is the constant = 1 (the forcing term is ).
k2 = 300; % spring constant for second mass (g/s^2) sys = lpvss("ygap",@(t,p) BouncingBallDF(t,p,k2)); % p = ygap = y1-y2 t = 0:0.05:40; pFcn = @(t,x,u) x(1)-x(3); xinit = [h1;0;h2;0]; [y,~,~,~,p] = step(sys,t,pFcn,RespConfig('InitialState',xinit)); figure(1), plot(t,y(:,1),t,y(:,2),t,abs(p-a1)) legend('y1','y2','|p-a1|') title('k2 = 300')
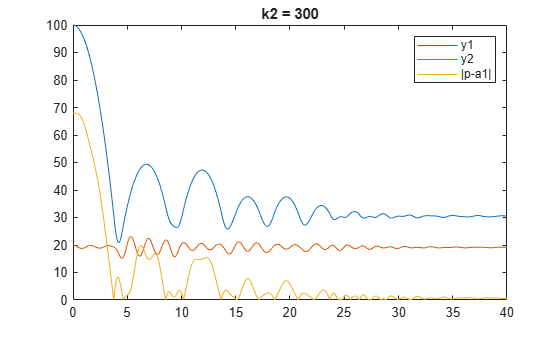
The curves show the position of the masses. At the start of simulation, mass 1 undergoes free fall until it hits mass 2. The collision causes the mass 2 to be displaced, but it recoils quickly and bounces mass 1 back. The two masses are in contact for the time duration where . When the masses settle down, their equilibrium values are determined by the static settling due to gravity.
High Floor Stiffness
Now simulate the response for a hard surface by setting k2 to 30,000 g/s^2.
k2 = 3e4; % spring constant for second mass (g/s^2) sys = lpvss("ygap",@(t,p) BouncingBallDF(t,p,k2)); t = 0:0.05:80; [y,~,~,~,p] = step(sys,t,pFcn,RespConfig('InitialState',xinit)); figure(2), plot(t,y(:,1),t,y(:,2),t,abs(p-a1)) legend('y1','y2','|p-a1|') title('k2 = 3e4')
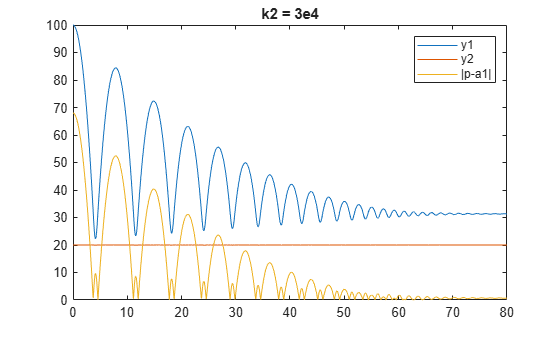
For high floor stiffness, the collision does not cause the mass 2 to be displaced. It instead bounces the mass 1 back to a higher position; also, it takes more bounces for mass 1 to settle.
Data Function Code
type BouncingBallDF.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = BouncingBallDF(~,p,k2)
% p = gap y1-y2
m1 = 7; % first mass (g)
k1 = 100; % spring constant for first mass (g/s^2)
c1 = 2; % damping coefficient associated with first mass (g/s)
m2 = 20; % second mass (g)
%k2 = 300; % spring constant for second mass (g/s^2)
c2 = 5; % damping coefficient associated with second mass (g/s)
g = 9.81; % gravitational acceleration (m/s^2)
a1 = 12; % uncompressed lengths of spring 1 (mm)
a2 = 20; % uncompressed lengths of spring 2 (mm)
if p>a1
% Uncoupled
A11 = [0 1; 0 0];
B11 = [0; -g];
C11 = [1 0];
D11 = 0;
A12 = [0 1; -k2/m2, -c2/m2];
B12 = [0; -g+(k2*a2/m2)];
C12 = [1 0];
D12 = 0;
A = blkdiag(A11, A12);
B = [B11; B12];
C = blkdiag(C11, C12);
D = [D11; D12];
else
A = [ 0 1, 0, 0; ...
-k1/m1, -c1/m1, k1/m1, c1/m1;...
0, 0, 0, 1; ...
k1/m2, c1/m2, -(k1+k2)/m2, -(c1+c2)/m2];
B = [0; -g+k1*a1/m1; 0; -g+(k2/m2*a2)-(k1/m2*a1)];
C = [1 0 0 0; 0 0 1 0];
D = [0;0];
end
E = [];
dx0 = [];
x0 = [];
u0 = [];
y0 = [];
Delays = [];