Discrete FIR Filter
Model FIR filters
Libraries:
Simulink /
Discrete
HDL Coder /
Discrete
HDL Coder /
HDL Floating Point Operations
Description
The Discrete FIR Filter block independently filters each channel of the input signal with the specified digital FIR filter. The block can implement static filters with fixed coefficients, and time-varying filters with coefficients that change over time. You can tune the coefficients of a static filter during simulation.
This block filters each channel of the input signal independently over time. The Input processing parameter allows you to specify whether the block treats each element of the input as an independent channel (sample-based processing), or each column of the input as an independent channel (frame-based processing). To perform frame-based processing, you must have a DSP System Toolbox™ license.
The output dimensions equal the input dimensions, except when you specify a matrix of filter taps for the Coefficients parameter. When you do so, the output dimensions depend on the number of different sets of filter taps you specify.
This block supports custom state attributes to customize and generate code more efficiently. For an example, see Custom State Attributes in Discrete FIR Filter block. Under certain conditions, the block also supports SIMD code generation. For details, see Code Generation.
The outputs of this block numerically match the outputs of the DSP System Toolbox Digital Filter Design (DSP System Toolbox) block.
This block supports the Simulink® state logging feature. For more information, see State.
Filter Structure Support
You can change the filter structure implemented with the Discrete FIR Filter block by selecting one of the following from the Filter structure parameter:
Direct formDirect form symmetricDirect form antisymmetricDirect form transposedLattice MA
You must have an available DSP System Toolbox license
to run a model with any of these filter structures other than Direct form.
For more information on the filter structures, see Algorithms.
Specifying Initial States
The Discrete FIR Filter block initializes the internal filter states to zero by default, which has the same effect as assuming that past inputs and outputs are zero. You can optionally use the Initial states parameter to specify nonzero initial conditions for the filter delays.
To determine the number of initial states you must specify and how to specify them, see the table on valid initial states. The Initial states parameter can take one of the forms described in the next table.
Valid Initial States
| Initial Condition | Description |
|---|---|
|
Scalar |
The block initializes all delay elements in the filter to the scalar value. |
|
Vector or matrix |
Each vector or matrix element specifies a unique initial condition for a corresponding delay element in a corresponding channel:
|
Examples

Cochlear Implant Speech Processor
Simulate the design of a cochlear implant that can be placed in the inner ear of a profoundly deaf person to restore partial hearing. Signal processing is used in cochlear implant development to convert sound to electrical pulses. The pulses can bypass the damaged parts of a deaf person's ear and be transmitted to the brain to provide partial hearing.

Active Noise Control with Simulink Real-Time
Design a real-time active noise control system using a Speedgoat® Simulink® Real-Time™ target.

Acoustic Noise Cancellation (LMS)
Use the least mean square (LMS) algorithm to subtract noise from an input signal. The example uses a preconfigured Simulink® model. The LMS Filter block in the dspanc model models an adaptive filter that uses the reference signal at its Input port and the desired signal at the Desired port to automatically match the filter response. The LMS Filter block subtracts the filtered noise from the original signal. As the filter converges, the resultant error signal contains only the original signal.

Use the Fixed-Point Tool to Rescale a Fixed-Point Model
Show you how to use the Fixed-Point Tool to refine the scaling of fixed-point data types associated with the feedback controller model fxpdemo_feedback. The Fixed-Point Tool enables multiple workflows for converting a model to use fixed-point data types.

Programmable FIR Filter for FPGA
Implement a programmable FIR filter for hardware and load the filter coefficients by using a memory-style interface.
Ports
Input
Output
Parameters
Main
Choose to specify the filter coefficients using tunable dialog parameters or through an input port, which is useful for time-varying coefficients.
Programmatic Use
Block Parameter:
CoefSource
|
| Type: character vector |
Values:
'Dialog parameters' | 'Input port'
|
Default:
'Dialog parameters'
|
Select the filter structure you want the block to implement. For more information, see Algorithms.
Dependencies
You must have an available DSP System Toolbox license to run a model with a Discrete FIR
Filter block that implements any filter structure other
than Direct form.
Programmatic Use
Block Parameter:
FilterStructure |
| Type: character vector |
Values:
'Direct form' | 'Direct form symmetric' | 'Direct form
antisymmetric' | 'Direct form transposed' | 'Lattice
MA' |
Default:
'Direct form'
|
Specify the filter coefficients as a scalar, vector or a matrix.
When you specify a row vector of filter taps, the block applies a single filter to the input. To apply multiple filters to the same input, specify a matrix of coefficients, where each row represents a different set of filter taps. To implement multiple filters, these conditions must apply:
Set Filter structure to
Direct form.Input must be a scalar.
Set Input processing to
Elements as channels (sample based).
Dependencies
To enable this parameter, set Coefficient
source to Dialog
parameters.
Programmatic Use
Block Parameter:
Coefficients
|
| Type: character vector |
| Values: vector |
Default:
'[0.5 0.5]'
|
Specify whether the block performs sample- or frame-based processing. You can select one of the following options:
Elements as channels (sample based)— Treat each element of the input as an independent channel (sample-based processing).Columns as channels (frame based)— Treat each column of the input as an independent channel (frame-based processing).Note
Frame-based processing requires a DSP System Toolbox license.
For more information, see Sample- and Frame-Based Concepts (DSP System Toolbox).
Programmatic Use
Block Parameter:
InputProcessing
|
| Type: character vector |
Values:
'Columns as channels (frame based)' | 'Elements as
channels (sample based)' |
Default:
'Elements as channels (sample based)'
|
Specify the initial conditions of the filter states. To learn how to specify initial states, see Specifying Initial States.
Programmatic Use
Block Parameter:
InitialStates
|
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'0' |
Select to control execution of this block with an enable port. The block is considered
enabled when the input to this port is nonzero, and is disabled when the input is
0. The value of the input is checked at the same time step as the
block execution.
Programmatic Use
Block Parameter:
ShowEnablePort
|
| Type: character vector |
Values:
'off' | 'on' |
Default:
'off' |
Specify the trigger event to use to reset the states to the initial conditions.
| Reset Mode | Behavior |
|---|---|
None | No reset |
Rising | Reset on a rising edge |
Falling | Reset on a falling edge |
Either | Reset on either a rising or falling edge |
Level | Reset in either of these cases:
|
Level hold | Reset when the reset signal is nonzero at the current time step |
Programmatic Use
Block Parameter:
ExternalReset |
| Type: character vector |
Values: 'None' |
'Rising' | 'Falling' |
'Either' | 'Level' | 'Level
hold' |
Default: 'None' |
Specify the time interval between samples. To inherit the sample time, set this
parameter to -1. For more information, see Specify Sample Time.
Dependencies
This parameter is visible only if you set it to a value other than
-1. To learn more, see Blocks for Which Sample Time Is Not Recommended.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SampleTime |
| Values: | "-1" (default) | scalar or vector in quotes |
Click this button to open the Filter Visualization Tool (fvtool (DSP System Toolbox)) and display the filter response of the filter
defined in the block dialog box.
Dependencies
To enable this parameter, set the Coefficient source parameter to
Dialog parameters.
This parameter appears only if you have a valid DSP System Toolbox license.
Data Types
Specify the tap sum data type of a direct form symmetric or direct form antisymmetric filter. The filter uses this data type when it sums the inputs prior to multiplication by the coefficients. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Dependencies
This parameter is only visible when you set the Filter
structure to Direct form
symmetric or Direct form
antisymmetric.
Programmatic Use
Block Parameter:
TapSumDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule'|'Inherit: Same as
input' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' |
'uint32' | 'int64' | 'uint64' | 'fixdt(1,16,0)' | '<data
type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the coefficient data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Same word length as inputA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
CoefDataTypeStr |
| Type: character vector |
Values:
'Inherit: Same word length as input'| 'int8' | 'uint8'
| 'int16' | 'uint16' | 'int32' | 'uint32' | 'int64' |
'uint64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Same wordlength as input' |
Specify the minimum value that a filter coefficient should have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
CoeffMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the maximum value that a filter coefficient should have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
CoeffMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the product output data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
ProductDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32'
| 'uint32' | 'int64' | 'uint64' | 'fixdt(1,16,0)' |
'<data type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the accumulator data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
AccumDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'Inherit: Same as product output' | 'int8' |
'uint8' | 'int16' | 'uint16' | 'int32' | 'uint32' | 'int64'
| 'uint64' | 'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the state data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Same as accumulatorA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
Dependencies
To enable this parameter, set the Filter
structure to Lattice
MA.
Programmatic Use
Block Parameter:
StateDataTypeStr |
| Type: character vector |
Values:
'Inherit: Same as accumulator' | 'Inherit: Same as
input' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' |
'uint32' | 'int64' | 'uint64' | 'fixdt(1,16,0)' | '<data
type expression>' |
Default:
'Inherit: Same as accumulator' |
Specify the output data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Same as accumulatorA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
When the input to the block is floating-point, the output data type matches the input data type since floating-point inheritance takes precedence over the fixed-point settings.
Programmatic Use
Block Parameter:
OutDataTypeStr |
| Type: character vector |
Values:
'Inherit: Same as accumulator' | 'Inherit: Same as
input' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' |
'uint32' | 'int64' | 'uint64' | 'fixdt(1,16)' |
'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Same as accumulator' |
Lower value of the output range that the software checks.
The software uses the minimum to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output minimum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMin |
| Values: | '[]' (default) | scalar in quotes |
Upper value of the output range that the software checks.
The software uses the maximum value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output maximum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMax |
| Values: | '[]' (default) | scalar in quotes |
Select to lock data type settings of this block against changes by the Fixed-Point Tool and the Fixed-Point Advisor. For more information, see Lock the Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
Block Parameter:
LockScale |
Values:
'off' | 'on' |
Default:
'off' |
Specify the rounding mode for fixed-point operations. For more information, see Rounding Modes (Fixed-Point Designer).
Programmatic Use
Block
Parameter:
RndMeth |
| Type: character vector |
Values:
'Ceiling' | 'Convergent' | 'Floor' |
'Nearest' | 'Round' | 'Simplest' |
'Zero' |
Default:
'Floor' |
Specify whether overflows saturate or wrap.
on— Overflows saturate to either the minimum or maximum value that the data type can represent.off— Overflows wrap to the appropriate value that the data type can represent.
For example, the maximum value that the signed 8-bit integer int8
can represent is 127. Any block operation result greater than this maximum value causes
overflow of the 8-bit integer.
With this parameter selected, the block output saturates at 127. Similarly, the block output saturates at a minimum output value of -128.
With this parameter cleared, the software interprets the overflow-causing value as
int8, which can produce an unintended result. For example, a block result of 130 (binary 1000 0010) expressed asint8is -126.
Tips
Consider selecting this parameter when your model has a possible overflow and you want explicit saturation protection in the generated code.
Consider clearing this parameter when you want to optimize efficiency of your generated code. Clearing this parameter also helps you to avoid overspecifying how a block handles out-of-range signals. For more information, see Troubleshoot Signal Range Errors.
When you select this parameter, saturation applies to every internal operation on the block, not just the output or result.
In general, the code generation process can detect when overflow is not possible. In this case, the code generator does not produce saturation code.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SaturateOnIntegerOverflow |
| Values: | 'off' (default) | 'on' |
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
More About
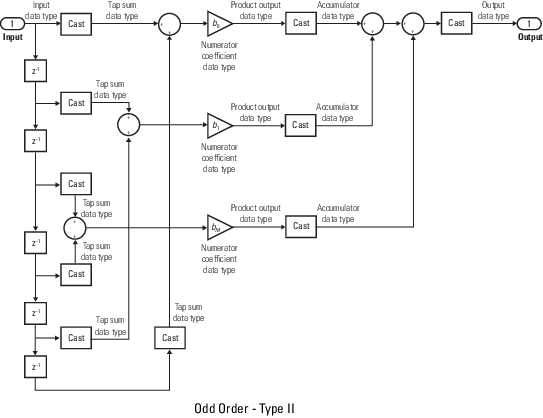
The following diagrams show the filter structure and the data types used within the Discrete FIR Filter block for fixed-point signals.
Direct Form
You cannot specify the state data type on the block mask for this structure because the input states have the same data types as the input.

Direct Form Symmetric
You cannot specify the state data type on the block mask for this structure because the input states have the same data types as the input.

Direct Form Antisymmetric
You cannot specify the state data type on the block mask for this structure because the input states have the same data types as the input.


Direct Form Transposed

Lattice MA

Algorithms
These are the structure diagrams used within the Discrete FIR Filter block.
Direct Form

Direct Form Symmetric
It is assumed that the filter coefficients are symmetric. The block only uses the first half of the coefficients for filtering.

Direct Form Antisymmetric
It is assumed that the filter coefficients are antisymmetric. The block only uses the first half of the coefficients for filtering.

Direct Form Transposed
States are complex when either the inputs or the coefficients are complex.

Lattice MA
