EtherCAT
Ethernet for Control Automation (EtherCAT) is an open Ethernet network protocol for real-time
distributed control. See
www.ethercat.org
.
To begin, configure the network by using an EtherCAT network configurator, and then load the configuration into the EtherCAT protocol blocks. The blocks connect to Intel® Ethernet boards that support the EtherCAT protocol and are compatible with PCI-standard bus architectures, such as PCI, PCI Express®, and PXI®.
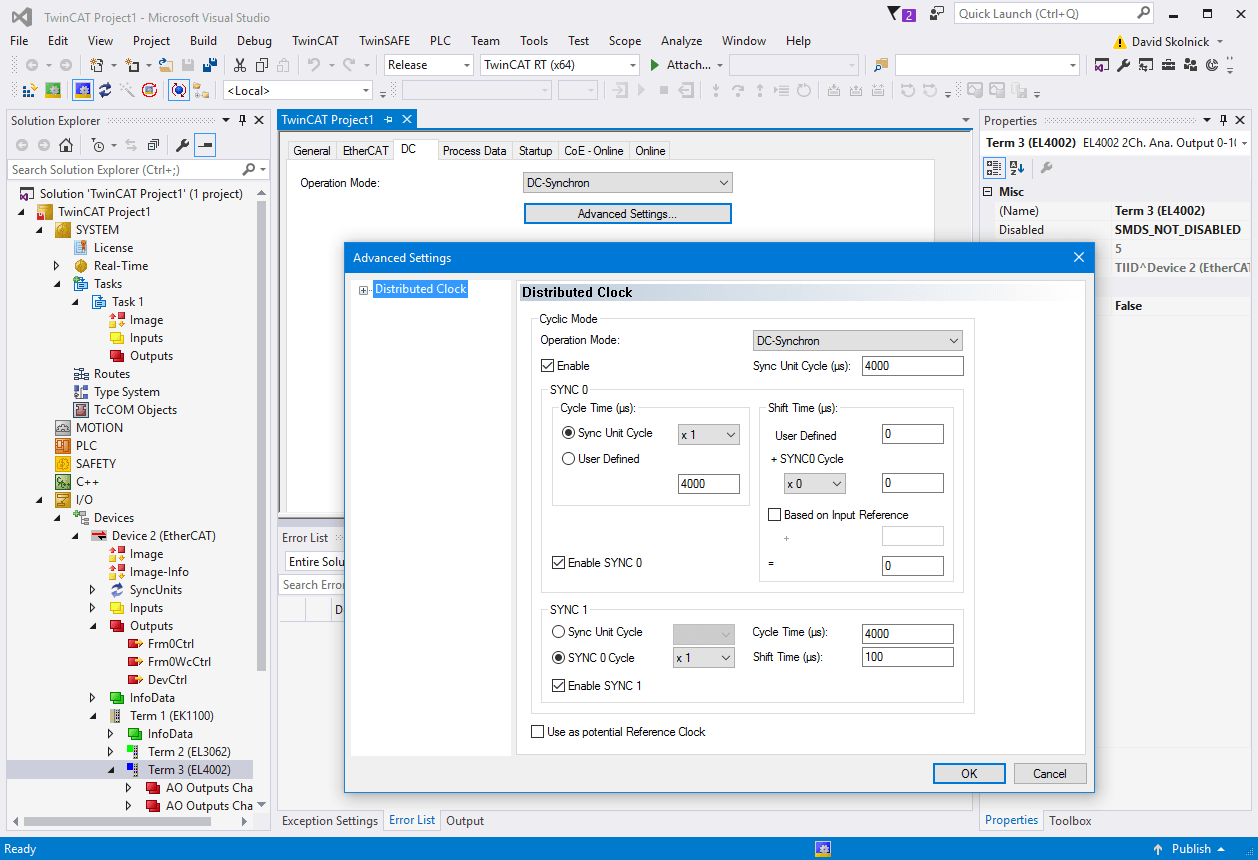
Simulink® Real-Time™ supports the Beckhoff® TwinCAT® configurator and the Acontis EC-Engineer configurator.
For detailed information about the configurators, see the
manufacturer documentation (
www.beckhoff.com
and
www.acontis.com/en/
). For detailed information about EtherCAT boards, see the manufacturer documentation.
Functions
slrealtime.EtherCAT.filterNotifications | Display EtherCAT notifications in human-readable format |
slrealtime.EtherCAT.getSignalNames | Display EtherCAT notifications in human-readable format |
Blocks
| EtherCAT Init | Initialize EtherCAT main device node with data in the EtherCAT Network Information (ENI) file |
| EtherCAT Get Emergency | Collect emergency messages from the EtherCAT bus (Since R2023b) |
| EtherCAT Get Notifications | Collect notifications from the EtherCAT bus |
| EtherCAT Get Scanbus Error Data | Detects when an EtherCAT device in the model is not responding (Since R2022b) |
| EtherCAT PDO Receive | Receive data from subordinate device represented by process data object |
| EtherCAT PDO Transmit | Send data to subordinate device represented by process data object |
| EtherCAT Sync SDO Upload | Read data synchronously from subordinate device represented by service data object |
| EtherCAT Sync SDO Download | Transmit data synchronously to subordinate device represented by service data object |
| EtherCAT Async SDO Upload | Read data asynchronously from subordinate device represented by service data object |
| EtherCAT Async SDO Download | Transmit data asynchronously to subordinate device represented by service data object |
| EtherCAT Sync SSC/SoE Upload | Read data synchronously from subordinate device represented by service data object |
| EtherCAT Sync SSC/SoE Download | Transmit data synchronously to subordinate device represented by service data object |
| EtherCAT Async SSC/SoE Upload | Read data asynchronously from subordinate device represented by service data object |
| EtherCAT Async SSC/SoE Download | Transmit data asynchronously to subordinate device represented by service data object |
| EtherCAT Get State | Get state of EtherCAT network |
| EtherCAT Set State | Set state of EtherCAT network |
| EtherCAT Get Device State | Get state of EtherCAT network (Since R2021b) |
| EtherCAT Set Device State | Set state of EtherCAT network (Since R2021b) |
Topics
EtherCAT Protocol Models
- Modeling EtherCAT Networks
Learn about Simulink Real-Time support for real-time distributed control with the EtherCAT protocol.
Reference
- EtherCAT Distributed Clock Algorithm
Learn about the EtherCAT main device shift and bus shift modes. - Fixed-Step Size Derivation
Determine the fixed step size for the EtherCAT model and the sample times for key blocks. - EtherCAT Protocol Mapping
Learn about the relationship between the third-party configurator capabilities and Simulink Real-Time capabilities. - EtherCAT Configurator Component Mapping
Learn about the relationship between the third-party configurator components and Simulink Real-Time blocks and block attributes. - EtherCAT Data Types
Learn about the relationship between EtherCAT data types and Simulink Real-Time data types. - EtherCAT Init Block DC Error Values
Learn about the EtherCAT distributed clock error values that the EtherCAT Init block returns. - EtherCAT Error Codes
The Error output for EtherCAT blocks returns an EtherCAT error code. - EtherCAT Init
Related Information
Featured Examples

EtherCAT Protocol with Beckhoff Analog IO Subordinate Devices EL3062 and EL4002
Communicate with EtherCAT devices using the Beckhoff® analog I/O terminals EL3062 and EL4002.

EtherCAT Protocol with Beckhoff Digital IO Subordinate Devices EL1004 and EL2004
Communicate with EtherCAT devices using the Beckhoff digital I/O terminals EL1004 and EL2004.

EtherCAT Protocol Sequenced Writing SoE Subordinate Device Configuration Variables
Use SoE blocks and a simple state machine to write configuration values to variables that can only be written before going to EtherCAT Op state.

EtherCAT Protocol Sequenced Writing CoE Subordinate Device Configuration Variables
Use CoE blocks and a simple state machine to write configuration values to variables that can only be written before going to EtherCAT Op state.

EtherCAT Protocol Detect Network Failure and Reset
Use the EtherCAT Notifications block to detect a failure in the connected network and to restart the network when the failure is corrected.

EtherCAT Protocol Motor Velocity Control with Accelnet Drive
Control the velocity of a motor by using EtherCAT communication.

EtherCAT Protocol Motor Position Control with Accelnet Drive
Control the position of a motor by using EtherCAT communication.
Generate ENI Files for EtherCAT Devices
Generate EtherCAT network information (ENI) files to use in Simulink® Real-Time™ with EtherCAT devices.