uss
Uncertain state-space model
Description
Use uss model objects to represent uncertain dynamic systems.
The two dominant forms of model uncertainty are:
Uncertainty in parameters of the underlying differential equation models (uncertain state-space matrices)
Frequency-domain uncertainty, which often quantifies model uncertainty by describing absolute or relative uncertainty in the frequency response (uncertain or unmodeled linear dynamics)
uss model objects can represent dynamic systems with either or both
forms of uncertainty. You can use uss to perform robust stability and
performance analysis and to test the robustness of controller designs.
Creation
There are several ways to create a uss model object,
including:
Use
tfwith one or more uncertain real parameters (ureal). For example:p = ureal('p',1); usys = tf(p,[1 p]);For another example, see Transfer Function with Uncertain Coefficients.
Use
sswith uncertain state-space matrices (umat). For example:p = ureal('p',1); A = [0 3*p; -p p^2]; B = [0; p]; C = ones(2); D = zeros(2,1); usys = ss(A,B,C,D);For another example, see State-Space Model with Uncertain Matrices.
Combine numeric LTI models with uncertain elements using model interconnection commands such as
connect,series, orparallel, or model arithmetic operators such as *, +, or -. For example:sys = tf(1,[1 1]); p = ureal('p',1); D = ultidyn('Delta',[1 1]); usys = p*sys*(1 + 0.1*D);
For another example, see System with Uncertain Dynamics.
Convert a double array or a numeric LTI model to
ussform usingusys = uss(sys). In this case, the resultingussmodel object has no uncertain elements. For example:M = tf(1,[1 1 1]); usys = uss(M);
Use
ucoverto create aussmodel whose range of possible frequency responses includes all responses in an array of numeric LTI models. The resulting model expresses the range of behaviors as dynamic uncertainty (ultidyn).
Properties
Object Functions
Most functions that work on numeric LTI models also work on uss
models. These include model interconnection functions such as
connect and feedback, and linear analysis
functions such as bode and stepinfo. Some
functions that generate plots, such as bode and
step, plot random samples of the uncertain model to give you a
sense of the distribution of uncertain dynamics. When you use these commands to return
data, however, they operate on the nominal value of the system only.
In addition, you can use functions such as robstab and
wcgain to perform robustness and worst-case analysis of
uncertain systems represented by uss models. You can also use tuning
functions such as systune for robust controller tuning.
The following lists contain a representative subset of the functions you can use with
uss models.
Examples
Create a second-order transfer function with uncertain natural frequency and damping coefficient.
w0 = ureal('w0',10); zeta = ureal('zeta',0.7,'Range',[0.6,0.8]); usys = tf(w0^2,[1 2*zeta*w0 w0^2])
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 2 states. The model uncertainty consists of the following blocks: w0: Uncertain real, nominal = 10, variability = [-1,1], 5 occurrences zeta: Uncertain real, nominal = 0.7, range = [0.6,0.8], 1 occurrences Model Properties Type "usys.NominalValue" to see the nominal value and "usys.Uncertainty" to interact with the uncertain elements.
usys is an uncertain state-space (uss) model with two Control Design Blocks. The uncertain real parameter w0 occurs five times in the transfer function, twice in the numerator and three times in the denominator. To reduce the number of occurrences, you can rewrite the transfer function by dividing numerator and denominator by w0^2.
usys = tf(1,[1/w0^2 2*zeta/w0 1])
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 2 states. The model uncertainty consists of the following blocks: w0: Uncertain real, nominal = 10, variability = [-1,1], 3 occurrences zeta: Uncertain real, nominal = 0.7, range = [0.6,0.8], 1 occurrences Model Properties Type "usys.NominalValue" to see the nominal value and "usys.Uncertainty" to interact with the uncertain elements.
In the new formulation, there are only three occurrences of the uncertain parameter w0. Reducing the number of occurrences of a Control Design Block in a model can improve the performance of calculations involving the model.
Examine the step response of the system to get a sense of the range of responses that the uncertainty represents.
step(usys)
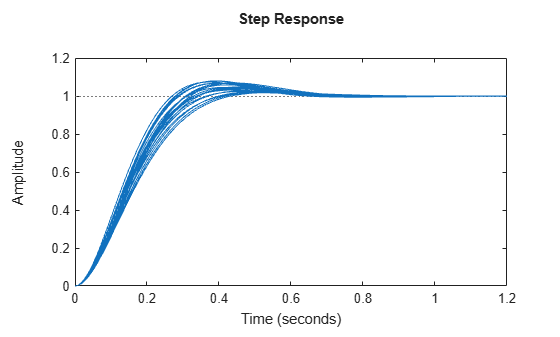
When you use linear analysis commands like step and bode to create response plots of uncertain systems, they automatically plot random samples of the system. While these samples give you a sense of the range of responses that fall within the uncertainty, they do not necessarily include the worst-case response. To analyze worst-case responses of uncertain systems, use wcgain or wcsigmaplot.
To create a state-space model with matrices having uncertain elements, you first use uncertain parameters such as ureal and ucomplex. Then use these elements to specify the state-space matrices of the system. For instance, create three uncertain real parameters and build state-spaces matrices from them.
p1 = ureal('p1',10,'Percentage',50); p2 = ureal('p2',3,'PlusMinus',[-.5 1.2]); p3 = ureal('p3',0); A = [-p1 p2; 0 -p1]; B = [-p2; p2+p3]; C = [1 0; 1 1-p3]; D = [0; 0];
The matrices constructed with uncertain parameters, A, B, and C, are uncertain matrix (umat) objects. Using them as inputs to ss results in a 2-output, 1-input, 2-state uncertain system.
sys = ss(A,B,C,D)
Uncertain continuous-time state-space model with 2 outputs, 1 inputs, 2 states. The model uncertainty consists of the following blocks: p1: Uncertain real, nominal = 10, variability = [-50,50]%, 2 occurrences p2: Uncertain real, nominal = 3, variability = [-0.5,1.2], 2 occurrences p3: Uncertain real, nominal = 0, variability = [-1,1], 2 occurrences Model Properties Type "sys.NominalValue" to see the nominal value and "sys.Uncertainty" to interact with the uncertain elements.
The display shows that the system includes the three uncertain parameters.
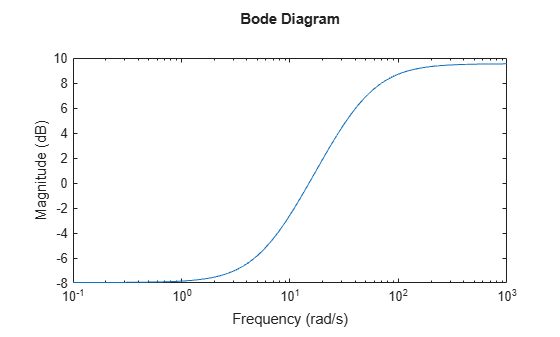
Create an uncertain system comprising a nominal model with a frequency-dependent amount of uncertainty. You can model such uncertainty using ultidyn and a weighting function that represents the frequency profile of the uncertainty. Suppose that at low frequency, below 3 rad/s, the model can vary up to 40% from its nominal value. Around 3 rad/s, the percentage variation starts to increase. The uncertainty crosses 100% at 15 rad/s and reaches 2000% at approximately 1000 rad/s. Create a transfer function with an appropriate frequency profile, Wunc, to use as a weighting function that modulates the amount of uncertainty with frequency.
Wunc = makeweight(0.40,15,3); bodemag(Wunc)
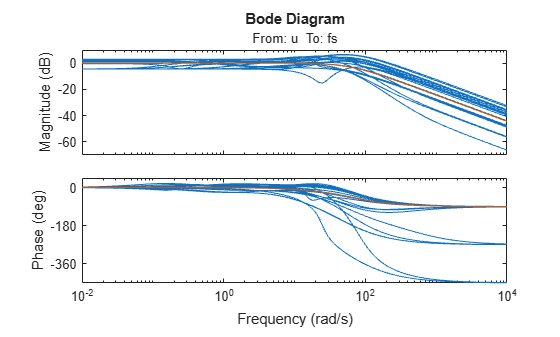
Next, create a transfer function representing the nominal value of the system. For this example, use a transfer function with a single pole at s = –60 rad/s. Then, create a ultidyn model to represent 1-input, 1-output uncertain dynamics, and add the weighted uncertainty to the nominal transfer function.
sysNom = tf(1,[1/60 1]); unc = ultidyn('unc',[1 1],'SampleStateDim',3); % samples of uncertain dynamics have three states usys = sysNom*(1 + Wunc*unc); % Set properties of usys usys.InputName = 'u'; usys.OutputName = 'fs';
Examine random samples of usys to see the effect of the uncertain dynamics.
bode(usys,usys.Nominal)
uss models, like all model objects, include properties that store dynamics and model metadata. View the properties of an uncertain state-space model.
p1 = ureal('p1',10,'Percentage',50); p2 = ureal('p2',3,'PlusMinus',[-.5 1.2]); p3 = ureal('p3',0); A = [-p1 p2; 0 -p1]; B = [-p2; p2+p3]; C = [1 0; 1 1-p3]; D = [0; 0]; sys = ss(A,B,C,D); % create uss model get(sys)
NominalValue: [2×1 ss]
Uncertainty: [1×1 struct]
A: [2×2 umat]
B: [2×1 umat]
C: [2×2 umat]
D: [2×1 double]
E: []
StateName: {2×1 cell}
StateUnit: {2×1 cell}
InternalDelay: [0×1 double]
InputDelay: 0
OutputDelay: [2×1 double]
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {2×1 cell}
OutputUnit: {2×1 cell}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: ''
Ts: 0
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
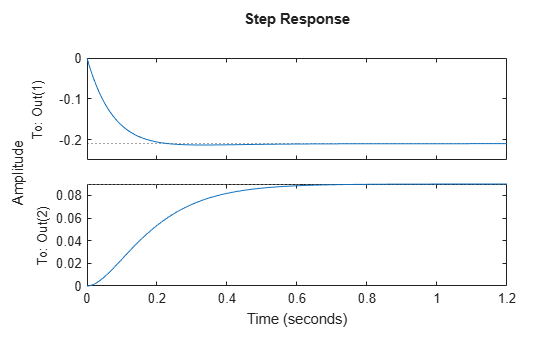
Most of the properties behave similarly to how they behave for ss model objects. The NominalValue property is itself an ss model object. You can therefore analyze the nominal value as you would any state-space model. For instance, compute the poles and step response of the nominal system.
pole(sys.NominalValue)
ans = 2×1
-10
-10
step(sys.NominalValue)
As with the uncertain matrices (umat), the Uncertainty property is a structure containing the uncertain elements. You can use this property for direct access to the uncertain elements. For instance, check the Range of the uncertain element named p2 within sys.
sys.Uncertainty.p2.Range
ans = 1×2
2.5000 4.2000
Change the uncertainty range of p2 within sys.
sys.Uncertainty.p2.Range = [2 4];
This command changes only the range of the parameter called p2 in sys. It does not change the variable p2 in the MATLAB® workspace.
p2.Range
ans = 1×2
2.5000 4.2000
Version History
Introduced before R2006a