Scenarios from Real-World Sensor Data
In automated driving applications, scenario generation is the process of building virtual scenarios from real-world vehicle data recorded from global positioning system (GPS), inertial measurement unit (IMU), camera, and lidar sensors. Automated Driving Toolbox™ provides functions and tools to automate scenario generation process. You can preprocess sensor data, extract roads, localize actors, and get actor trajectories to create an accurate digital twin of a real-world scenario. Simulate the generated scenario and test your automated driving algorithms against real-world data.
Scenario Builder for Automated Driving Toolbox support package provides tools to automatically build and visualize virtual scenarios from real-world data recorded using various sensors such as GPS, IMU, camera, and lidar. To learn more, see Overview of Scenario Generation from Recorded Sensor Data.
To generate scenarios from recorded sensor data, download the Scenario Builder for Automated Driving Toolbox support package from the Add-On Explorer. For more information on downloading add-ons, see Get and Manage Add-Ons.
Apps
| Driving Log Analyzer | Import, visualize, and synchronize real-world driving sensor data (Since R2025b) |
Functions
Topics
Getting Started
- Overview of Scenario Generation from Recorded Sensor Data
Learn the basics of generating scenarios from recorded sensor data. - Coordinate Systems for Scenario Generation
Learn the coordinate system used in Scenario Builder for Automated Driving Toolbox support package workflows. - Optional Set Up for Scenario Generation
Learn how to download and install optional third-party software for Scenario Builder for Automated Driving Toolbox support package. - Extract Key Scenario Events from Recorded Sensor Data
Extract key scenario events from recorded sensor data.
Scene Generation
- Generate RoadRunner Scene Using Processed Camera Data and GPS Data
Generate RoadRunner scene using labeled camera images and GPS data. - Generate RoadRunner Scene from Recorded Lidar Data
Generate RoadRunner HD map from recorded lidar data using pretrained deep learning model. - Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data. - Generate RoadRunner Scene with Traffic Signs Using Recorded Sensor Data
Generate RoadRunner scene with traffic signs using recorded sensor data. - Generate RoadRunner Scene Using Aerial Lidar Data
Generate RoadRunner scene from aerial lidar data. - Generate RoadRunner Scene Using Aerial Hyperspectral and Lidar Data
Generate RoadRunner scene from aerial hyperspectral and lidar data. - Georeference Sequence of Point Clouds for Scene Generation
Georeference sequence of point clouds for scene generation. - Transform Aerial Point Cloud for Scene Generation
Georeference aerial point cloud for scene generation.
Scenario Generation
- Preprocess Lane Detections for Scenario Generation
Format lane detection data to update lane specifications for scenario generation. - Smooth GPS Waypoints for Ego Localization
Create jitter-limited ego trajectory by smoothing GPS and IMU sensor data. - Generate Scenario from Actor Track Data and GPS Data
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data. - Extract Vehicle Track List from Recorded Camera Data for Scenario Generation
Extract actor track list from raw camera data for scenario generation. - Extract 3D Vehicle Information from Recorded Monocular Camera Data for Scenario Generation
Extract 3D vehicle information from recorded monocular camera data for scenario generation. - Synchronize GPS, Camera, and Actor Track Data for Scenario Generation
Synchronize multiple recorded sensor data for scenario generation. (Since R2025a) - Simulate RoadRunner Scenario with Custom 3D Assets Generated from Single-View Camera Images
Simulate RoadRunner scenario with assets from camera images. (Since R2025a)
Featured Examples

Generate RoadRunner Scenario from Recorded Sensor Data
Generate RoadRunner Scenario from recorded GPS data and preprocessed actor track list.

Ego Vehicle Localization Using GPS and IMU Fusion for Scenario Generation
Localize ego vehicle by fusing GPS and IMU sensor data to generate virtual driving scenario.

Ego Localization Using Lane Detections and HD Map for Scenario Generation
Perform lane-level localization of ego vehicle using lane detections, HD map data, and GPS data.
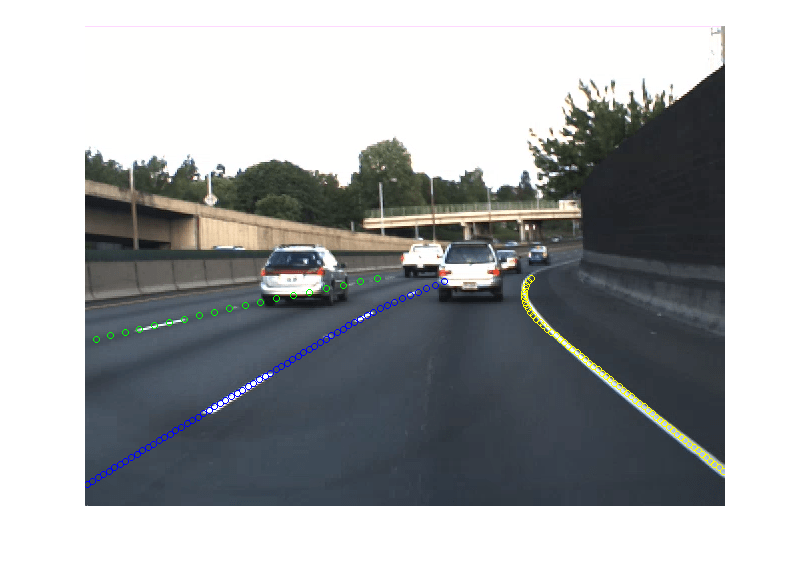
Extract Lane Information from Recorded Camera Data for Scene Generation
Extract lane information from raw camera data to generate ASAM OpenDRIVE® scene or RoadRunner scene.

Generate RoadRunner Scene Using Labeled Camera Images and Raw Lidar Data
Generate road scene with lanes from labeled camera images and raw lidar data.
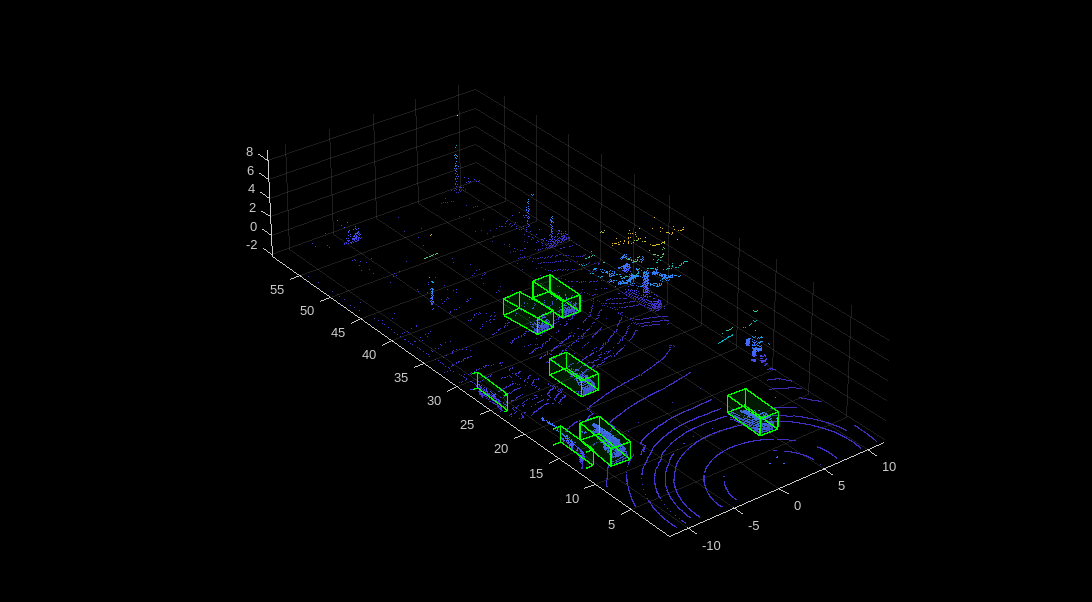
Extract Vehicle Track List from Recorded Lidar Data for Scenario Generation
Extract actor track list from recorded lidar data using pretrained vehicle detection model and JPDA tracker.

Fuse Prerecorded Lidar and Camera Data to Generate Vehicle Track List for Scenario Generation
Generate scenario by fusing and smoothing tracked lidar data and camera data.

Generate RoadRunner Scene with Trees and Buildings Using Recorded Lidar Data
Generate RoadRunner scene with trees and buildings using recorded lidar data.

Simulate RoadRunner Scenario with Custom 3D Assets Generated from Single-View Camera Images
Simulate RoadRunner scenario with assets from camera images.

Generate ASAM OpenCRG Using Lidar Data
Generate ASAM OpenCRG® file from lidar data