
Use the Euler-Lagrange equation to derive differential equations
Use the Euler-Lagrange tool to derive differential equations based on the system Lagrangian. The Lagrangian is defined symbolically in terms of the generalized coordinates and velocities, and the
- 6.8K (All time)
- 7 (Last 30 days)
- 4.5 / 5
- Community
-
24 Oct 2016

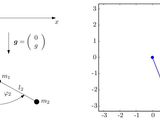
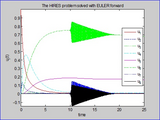
A function that solves the Euler-Lagrange Equations using the Symbolic Math Toolbox.
A function that solves the Euler-Lagrange Equations using the Symbolic Math Toolbox. It comes with three examples: 1) a generic point-mass model, 2) a 6-DOF quadrotor model and 3) an inverted
- 690 (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
7 Jul 2021
Solve Euler–Lagrange equation automatically.
- 2.6K (All time)
- 1 (Last 30 days)
- 4.8 / 5
- Community
-
1 Sep 2016

Physical modeling in academia: the rotary pendulum with low-cost hardware
Model, analyze and deploy the rotary pendulum system
implementation models for LEGO Mindstorms NXT and EV3, a video showing the controlled LEGO system in action, and a hardware construction manual. For the traditional modeling approach the Euler-Lagrange tool is
- 3.5K (All time)
- 4 (Last 30 days)
- 4.4 / 5
- Community
-
1 Sep 2016

Using this library one can derive differential equations for any dynamic systems and solve response of the system for a given conditions.
Matlab: Euler-Lagrange Library for Derving Equations of Dynamic SystemsUsing the above library, one can derive differential equations for any dynamic systems and solve response of the system for a
- 1K (All time)
- 1 (Last 30 days)
- 2.8 / 5
- Community
-
16 Jul 2024

Simulation of a multi-pendulum for any number of segments.
derived from Euler-Lagrange equations. The multi pendulum is a beautiful example of how a simple physical system can produce unpredictable, chaotic behaviour. It's also a nice example of using
- 442 (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
21 Nov 2016

Dynamics Simulator for Kinematic Chains
This is a library that performs a dynamics simulation of a robotic arm.
The library is a basic dynamic simulator for kinematic chains. You just need to provide the symbolic Denavit-Hartenber parameter matrix. 'ComputeDynamics' function uses the Euler-Lagrange method to
- 1.6K (All time)
- 1 (Last 30 days)
- 4.0 / 5
- Community
-
22 Aug 2011

A double pendulum consists of one pendulum attached to another.
A double pendulum movement simulation using Matlab script editor by solving the Euler-Lagrange differential equations for theta1 and theta2
- 222 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
25 Jan 2021

Kinematic Filtering for human and robot Trajectories
Kinematic Filtering computes the smoothest trajectory representing the noisy input trajectory
those constraints.===== Algorithm [2] ========Solving boundary value problem for the Euler-Lagrange Equations of the jerk-accuracy functional.[x, y, ... ]=filter_JA(trj_ns); filter_JA computes the
- 585 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
22 Dec 2016

Simulation of double and coupled pendulum
Simulation of motion of pendula (2D & 3D) by solving Euler Lagrange equations
- 1.5K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
24 Aug 2024

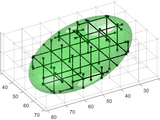
Euclidian projection on ellipsoid and conic
Projecting a point on ellipsoid or conic in n-dimensional space
center.Or on generalized conic E = { x : x'*A*x + b'*x + c = 0 }.The projection is the minimization problem: min | x - P | (or max | x - P|) for x in E.Method: solve the Euler Lagrange equation with respect
- 1.1K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
25 May 2010

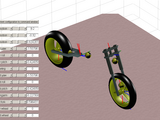
13 DOF motorcycle model W. Ooms
create and watch realistic simulations of motorcycle maneuvers - theoretical mechanics
Yamaha FJR 1300). The motorcycle parts are rear wheel, swingarm, main body, steering head, front fork and front wheel. Using the Euler-Lagrange formalism of classical mechanics 13 second order non linear
- 762 (All time)
- 8 (Last 30 days)
- 4.7 / 5
- Community
-
9 Jul 2018

Numerical solution of gyroscope-gyrocompass Lagrange equations
The mfile 'gyroscope_plot' produces:-Generalized coordinates, velocities/time (euler angles 313)-Phase subspaces-State space -Energies/time-Generalized momenta/time-Simulation: symmetry axis pathThe
- 1.5K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
17 Jan 2013
- 2.1K (All time)
- 7 (Last 30 days)
- 4.4 / 5
- Community
-
4 Apr 2012

Spherical-Robot-Norma-Dynemics
This file represents the dynamics of Norma, a spherical robot. Please refer to https://arxiv.org/pdf/1908.02243 for more details
turning maneuvers as a nonholonomic robot. The advantage of the proposed mechanical design lies in its convenience of physical implementation, agility, and accurate mathematical model. The Euler Lagrange
- 120 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
13 Jul 2021

animated spinning top with Cardan mounting
Plots an animated spinning top with Cardan mounting from raw animation data.
The 3D animation is created using the surf and drawnow commands. An example animation file is provided. The rotation is based on Euler/Cardan angles and performed with individually computed rotation
- 2.4K (All time)
- 1 (Last 30 days)
- 4.7 / 5
- Community
-
1 Aug 2010
Show animation of the double pendulum's (mostly) chaotic behavior.
- 13.1K (All time)
- 4 (Last 30 days)
- 4.3 / 5
- Community
-
4 Oct 2010

Rigid motions and robotics toolbox
3D rigid transforms and robotics with quaternions and dual quaternions (OO interface)
capabilities of the toolbox include: + Newton-Euler recursive dynamics, i.e. finding forces and torques at each joint from known kinematics. + Lagrange-Euler dynamics, i.e. matrix
- 1.3K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
28 Mar 2017
Belocerkowski-Davidov method for solving gas dynamical system.
This program is the part of my BC work.
- 411 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
16 Jun 2009

This repository contains mathematic numerical calculations
1-curve fitting & interpolations : Lagrange Interpolation, linear interpolation, linear regression, newton_interpolation1, quadratic interpolation2-integration & derivation
- 148 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
5 Jan 2021
Several kinds of Mathematical examples!
Here there are several kinds of Mathematical problems!
Chapter II/SECTION 1/2/3bld020101.m Interpolation of 1/(1 + x*x)bld020102.m Lagrange polynomials for n = 3bld020103.m Example for Bezier polynomial of degree n = 3bld020104.m Hermite polynomials for
- 3.6K (All time)
- 1 (Last 30 days)
- 4.5 / 5
- Community
-
2 Aug 2007

Computing Lagrange points L1-L3
Detailed computation and discussion of Lagrange Points L1-L3 and a few words about L4-L5.
The placement of the JWST (Hubble follow-on telescope) at Lagrange Point L2 has increased interest in these unusual points in space. They were first mentioned by Euler and carefully analyzed by
- 207 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
23 Mar 2022

ELARA - Flexible Robot Simulation and Control Toolbox
A MATLAB toolbox for the efficient simulation and optimal control of rigid-flexible robotic systems
:- `OCPIntegratorVI`: First/second-order variational/discrete Euler-Lagrange transcription (DMOC)- `OCPIntegratorRK`: Second-/fourth-order ODE transcription with explicit Runge-Kutta integration (`RK2` and `RK4
- 12 (All time)
- 3 (Last 30 days)
- -- / 5
- Community
-
31 May 2026

Avionics and UAV Control Systems Library
R&D portfolio for UAV flight dynamics, control systems, and autonomous navigation algorithms
calculating rigid body dynamics using **Euler Equations**.* **Features:** Motor Mixing Algorithm (Quad-X), Aerodynamic Drag, and 3D Visualization.### 2. 👁️ Computer Vision & Autonomous Tracking
- 74 (All time)
- 10 (Last 30 days)
- 5.0 / 5
- Community
-
1 Dec 2025
Function to Convert between DCM, Euler angles, Quaternions, and Euler vectors
Function to convert rotation data between 4 types: DCM, Euler Angles, Quaternions, and Euler Param.
SpinCalc is a consolidated matlab function that will convert any rotation data between the 4 types included. Will also convert between 2 different Euler angle set types.Multiple orientations can be
- 15.3K (All time)
- 2 (Last 30 days)
- 4.8 / 5
- Community
-
25 Jan 2013

Analytical solution for Euler-Bernoulli beam with n simple supports.
The live script getEulerBernoulliExamples.mlx shows the exemplary use of the live function getEulerBernoulliFunction.mlx.The live function getEulerBernoulliFunction.mlx returns beam displacement and
- 533 (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
8 May 2024

Euler c2d Transformations (c2d_euler)
Transforms a continuous transfer function to a discrete transfer function using the forward and backward Euler methods.
c2d_euler Transforms a continuous transfer function to a discrete transfer function using the forward and backward Euler methods.SyntaxHz = c2d_euler(Hs,T,type) Hz =
- 1.5K (All time)
- 7 (Last 30 days)
- 5.0 / 5
- Community
-
16 Jul 2024

Inverse dynamics with recursive Newton-Euler
Inverse dynamics with recursive Newton-Euler of an open kinematic chain and standard DH-parameters
Inverse dynamics with recursive Newton-Euler of an open kinematic chain described with standard DH-parametersOptional:Robot toolbox is used for comparison: http://www.petercorke.com/RTB/Download and
- 1.4K (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
6 Nov 2021

Lagrange Polynomial Coefficents
Computation of the Coefficients of Lagrange Polynomial of order-n
Differently from other similar functions, poly_lagrange does not need points to directly evaluate the polynomial: it gives, as output, only the coefficients of Lagrange Polynomial to be evaluated
- 312 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
19 Feb 2016

a simple m-file to perform a lagrange interpolation in 2D
this mfile only works on rectangular sets of points.it performs a lagrange interpoaltion in x direction as first and after that the points on these xCurves are interpolated in y-direction.
- 2.3K (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
27 Nov 2009
Wavesoftware includes numerical simulation of acoustic, water and elastic wave problems
- 622 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
22 Mar 2016
Adaptive-Euler-Elastica-Image-Inpainting
An Adaptive Image Inpainting Method Based on Euler's Elastica with Adaptive Parameters Estimation and the Discrete Gradient Method
AbstractEuler's Elastica is a common approach developed based on minimizing the elastica energy. It is one of the effective approaches to solve the image inpainting problem. Nevertheless, there are
- 101 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
9 Sep 2020

- 11.4K (All time)
- 24 (Last 30 days)
- 4.9 / 5
- Community
-
1 Aug 2024

Natural frequencies & buckling loads of columns using Finite Element Method
Natural frequencies and Euler buckling load are calculated using finite element method technique
These files calculate the natural frequencies and Euler buckling load using Finite element technique. Hermitian beam elements are used as interpolation functions. Assembled mass, geometric stiffness
- 6.6K (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
22 Sep 2011

Weighted Essentially Non-Oscillatory (WENO) Scheme for Euler
A Fifth order WENO solver for the Euler system of equations
- 1.1K (All time)
- 3 (Last 30 days)
- 4.5 / 5
- Community
-
30 Aug 2018
lagrange interpolation and derivative
This function performs the Lagrange interpolation of a function and its derivative.
This function performs the Lagrange interpolation of a function (y) or its derivative (dy/dx). usage: y=lagrange(x,pointx,pointsy,0) ordy=lagrange(x,pointx,pointsy,1) or
- 4.7K (All time)
- 1 (Last 30 days)
- 4.0 / 5
- Community
-
24 Aug 2006

MATLAB Support for MinGW-w64 C/C++/Fortran Compiler
Install the MinGW-w64 C/C++/Fortran compiler for Windows
- 1.2M (All time)
- 6.4K (Last 30 days)
- 2.9 / 5
- MathWorks
-
22 Jul 2026
Special Functions math library
Collection of Special Functions programs.
the complex Gamma, complex LogGamma, complex error, complex psi, complex Riemann zeta, vectorized factorial, vectorized double factorial functions as well as Bernoulli, Euler, Genocchi, and totient
- 12.3K (All time)
- 3 (Last 30 days)
- 4.7 / 5
- Community
-
26 Aug 2004
Lagrange polynomial interpolation
Lagrange polynomial interpolation
Approx a point-defined function using Lagrange polinomial interpolation method
- 45.2K (All time)
- 3 (Last 30 days)
- 3.7 / 5
- Community
-
31 Mar 2016

Acrobot Derivation and Simulation
Derive equations and simulate acrobot (double pendulum)
- 513 (All time)
- 1 (Last 30 days)
- 1.0 / 5
- Community
-
12 Dec 2015
Simple MATLAB file for Lagrange Interpolation
- 285 (All time)
- 2 (Last 30 days)
- 4.5 / 5
- Community
-
7 Feb 2020

Simulate Brownian particle motion by the Euler–Maruyama method
, solutions arise under an initial condition and boundary conditions. Therefore solutions of stochastic differential equations exist and are unique (see app.). For this simulation, the Euler–Maruyama (EM
- 1K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
14 Nov 2018

This script plots Euler spiral and some of its variants.
Euler spiral is generated by evaluating Fresnel integral. By changing some of the parameters, different type of spirals are generated. EulerSpiral.m make simple plot. EulerSpiralDeco.m make ribbon
- 2.4K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
6 May 2016
Lagrange is a function that calculate equations of motion (Lagrange's equations)
Lagrange is a function that calculate equations of motion (Lagrange's equations) d/dt(dL/d(dq))- dL/dq=0. It Uses the Lagrangian that is a function that summarizes thedynamics of the system
- 6.4K (All time)
- 8 (Last 30 days)
- 4.6 / 5
- Community
-
19 Feb 2009

Graphical display of Euler and Fixed Angles
Easy to use GUI that gives Euler angles for different rotation matrices and gives rotation matrices for different Euler angles. Also it animates the angle rotations one by one for more understanding.
- 4.3K (All time)
- 2 (Last 30 days)
- 4.9 / 5
- Community
-
9 Jan 2011
this is a mat-lab function that calculates the Lagrange multipliers of the maximum entropy problem (example provided)
- 745 (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
9 Oct 2018

Euler angle, DCM, Quaternion, and Euler Vector Conversion/Teaching GUI
A GUI that helps users learn how Euler angles and other rotational data relate to one another.
This is an instructional GUI to be used for learning how Euler angles, DCMs, quaternions, and Euler vector parameters relate in the rotation of cartesian frames (A to B). Can also be used to convert
- 8.8K (All time)
- 8 (Last 30 days)
- 4.3 / 5
- Community
-
12 Sep 2012

Huygens-Fresnel integral approximation on the GPU
Simulate electromagnetic wave propagation through free-form apertures, or off rough surfaces. Speed up the computation by using the GPU.
- 1.9K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
23 Oct 2020
Montalvo Models, Simulations and Scripts
This is my public repo of all my MATLAB Screen cast codes and other random codes written in MATLAB
bot to knock the other bot out of the screenTraffic - Simulate traffic on a multi-lane highwayColor_Illusions - A script to illustrate color illusionsProject Euler - Go Check out projecteuler.net - Here
- 1.4K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
30 Jun 2023

Animate sets of Euler rotations using arbitrary Euler angles and rotation order.
[coordSys,as] = animEuler(h,rotSet,angs) animates the rotation of a dextral coordinate system using three arbitrary Euler angles (angs) about three axes (rotSet) in figure (h). rotSet is an array of
- 2.4K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
29 Apr 2009

Numerical Methods for Physics, 2e
Companion Software, physics, problem solving, companion software, numerical methods
- 12K (All time)
- 1 (Last 30 days)
- 4.5 / 5
- Community
-
21 Nov 2002
MatthewPeterKelly/Lagrange_Mechanics_Derivations
Tutorial using Lagrange equations to derive equations of motion for mechanical systems.
- 445 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
11 Dec 2015
Measure of geometric parameters in 2D or 3D images (surface area, perimeter, Euler Number...)
formula)* the(2D) Euler NumberParameters available for 3D images are:* the volume,* the surface area (measured using the Crofton formula),* the surface area of the interface between two labels* the mean
- 4.6K (All time)
- 1 (Last 30 days)
- 4.9 / 5
- Community
-
11 Jan 2021

sssMOR is a MATLAB toolbox for model order reduction of large-scale dynamical systems in state-space
- 1.4K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
11 Sep 2017

- 393 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
12 Sep 2017

6 DoF Vehicle Model in Simulink
Model for yaw studies. Discrete-time model, euler-fwd integration. RT code compile-able. All-wheel steer-drive. 2015-20 Matlab compatible.
- 1.4K (All time)
- 7 (Last 30 days)
- 5.0 / 5
- Community
-
6 Jan 2021
- 6.3K (All time)
- 2 (Last 30 days)
- 4.4 / 5
- Community
-
30 Aug 2002
Scripts and Models for Chapter 5 of the book - MATLAB/Simulink Essentials by Sulaymon ESHKABILOV
Models and scripts - solutions of various types ODEs of 1, 2, 3 and n-th order
The models and scripts given in this folder are solutions of ODEs of 1, 2, 3 and n-th order IVPs which highlight numerical solution search methods of ODEs via Euler, Adams, Adams-Moulton, Runge-Kutta
- 215 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
21 Nov 2016

solve differential equation Euler method
all functions ans scripts to solve differential eqautions using Euler method
- 216 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
6 Oct 2020

Explicit Numerical Methods to solve Differential Equation
Here , I compare Euler, Runge-Kutta and Adam-Bashforth methods to integrate a simple function.
- 379 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
3 Jan 2016