groundTruth
Ground truth label data
Description
The groundTruth object contains information
about the data source, label definitions, and marked label annotations for a set of
ground truth labels. You can export or import a groundTruth object from the Image Labeler
and Video Labeler
apps. For a summary about the data stored in the groundTruth object,
see Elements of Ground Truth Objects.
To create training data for an object detector from arrays of
groundTruthobjects, use theobjectDetectorTrainingDatafunction.To create training data for a semantic segmentation network from arrays of
groundTruthobjects, use thepixelLabelTrainingDatafunction.
Creation
To export a groundTruth object from a labeling app, on the app toolstrip,
select Export Labels > To Workspace. The app exports the object to the MATLAB® workspace. To create a groundTruth object
programmatically, use the groundTruth function (described
here).
Description
gTruth = groundTruth(dataSource,labelDefs,labelData)
dataSourcespecifies the source of the ground truth data and sets theDataSourceproperty.labelDefsspecifies the label, sublabel, and attribute definitions of the ground truth data and sets theLabelDefinitionsproperty.labelDataspecifies the identifying information, position, and timestamps for marked labels and sets theLabelDataproperty.
Properties
Source of ground truth data, specified as a groundTruthDataSource object.
The object contains information that describes the video, image sequence, or
custom data source from which ground truth data was labeled.
To access images from the original data source, use VideoReader or imageDatastore. You can
also use a custom read function. For more details, see Use Custom Image Source Reader for Labeling.
This property is read-only.
Label definitions, specified as a table. To create this table, use one of these options.
In one of the labeling apps, create label definitions, and then export them as part of a
groundTruthobject.Use a
labelDefinitionCreatorobject to generate a label definitions table. If you save this table to a MAT-file, you can then load the label definitions into a labeling app session by selecting Load > Label Definitions from the app toolstrip.Create the label definitions table at the MATLAB command line.
This table describes the required and optional columns of the table specified in the
LabelDefinitions property.
| Column | Description | Required or Optional |
|---|---|---|
Name | Strings or character vectors specifying the name of each label definition. | Required |
Type | labelType
enumerations that specify the type of each label
definition, such as Rectangle or
Scene. | Required |
LabelColor | 1-by-3 row vectors of RGB triplets that specify the colors of the label definitions. Values are in the range [0, 1]. The color yellow (RGB triplet [1 1 0]) is reserved for the color of selected labels in the labeling apps. | Optional When you define labels in a labeling app, you must specify a color. Therefore, an exported label definitions table always includes this column. When you create label
definitions using the
|
PixelLabelID | Scalars, column vectors, or M-by-3
matrices of integer-valued label IDs.
PixelLabelID specifies the pixel
label values used to represent a label definition. Pixel
label ID values must be between 0 and 255. | Optional When you define pixel labels in a labeling app or the
When creating a label
definitions table at the MATLAB command line, if you set
|
Group | Strings or character vectors specifying the group to which each label definition belongs. | Optional If you create the label definitions table at the
MATLAB command line, you do not need to
include a If you export label definitions
from a labeling app or create them using a
|
Description | Strings or character vectors that describe each label definition. | Optional If you create the label definitions table at the
MATLAB command line, you do not need to
include a If you export label definitions
from a labeling app or create them using a
|
Hierarchy | Structures containing sublabel and attribute data for
each label definition. For an example of the
Hierarchy format, see Get Started with the Image Labeler or Get Started with the Video Labeler. | Optional In labeling apps, when you
define sublabels or attributes, the exported
|
For example, consider a table with label definitions named Sky,
Vegetation, Lanes,
StopSign, and Vehicle, and that
was exported from the Video Labeler app.
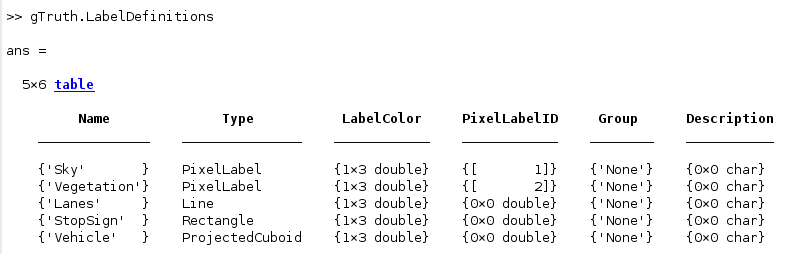
The label definitions include pixel labels, so the table includes a
PixelLabelIDcolumn.Two of the labels contain attributes, so the app created a
Hierarchycolumn that applies across all label definitions.The label definitions do not have assigned groups, so the
Groupcolumn is'None'for all label definitions.
Note
Labeler apps can only load pixel data that have pixel IDs between 1 and 255.
This property is read-only.
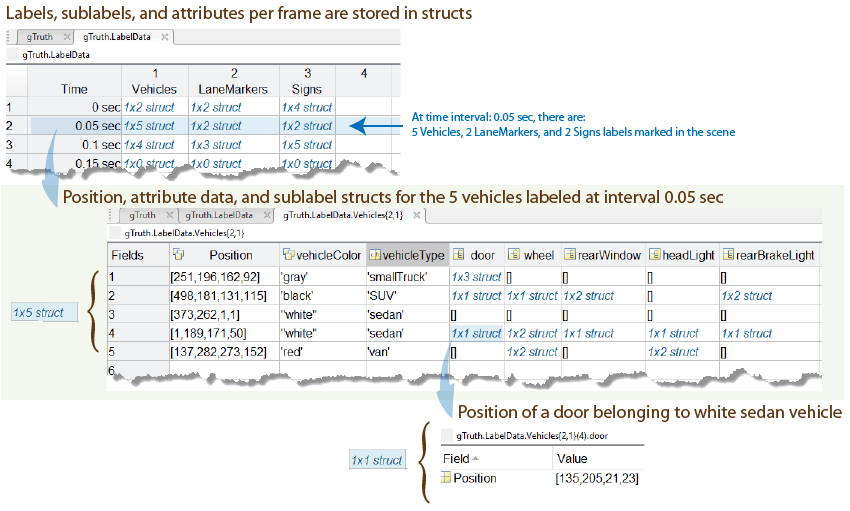
Label data for each ROI and scene label, specified as a table for image collections
or a timetable for videos or image
sequences. Each column of LabelData holds labels for a
single label definition and corresponds to the Name value
for each row in LabelDefinitions. These
LabelData describes the elements of the table. The
label categories are specified as labelType
enumerations.
Alternatively, for ROI label data that is grouped by label type, a single
column labeled ROILabelData, can be used and specified as
a structure containing at least one label type,
RectangleData, PolygonData,
LineData, or ProjCuboidData.
The storage format for each label type is described in the table.
| Label Type | Storage Format for Labels at Each Timestamp |
|---|---|
labelType.Rectangle |
|
labelType.RotatedRectangle |
For one or more rotated rectangles, specify in spatial coordinates as an M-by-5 numeric matrix, where each row specifies a rotated rectangle of the form [xctr yctr w h yaw].
|
|
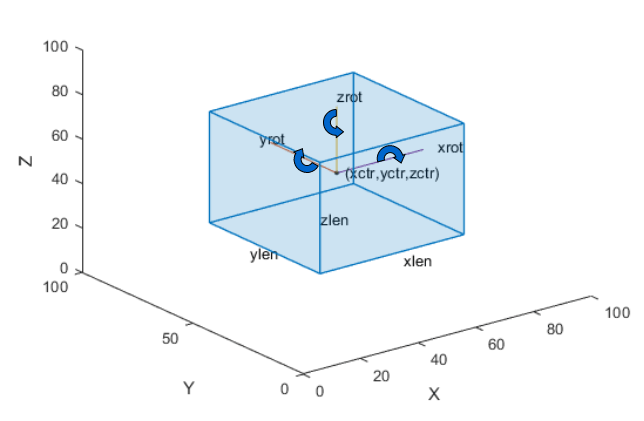
The figure shows how these values determine the position of a cuboid.
|
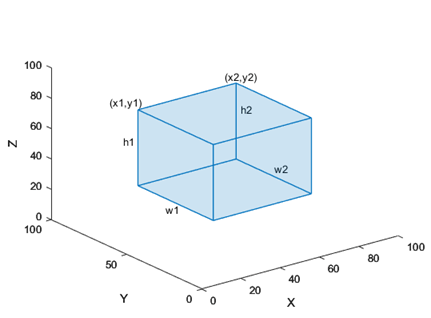
|
The figure shows how these values determine the position of a cuboid.
|
labelType.Line |
|
labelType.PixelLabel | Label data for all pixel label definitions is stored in a
single M-by-1 |
labelType.Polygon |
|
labelType.Custom | Labels are stored exactly as they are specified in the
timetable. If you import a
groundTruthMultisignal object
containing custom label data into the Ground Truth
Labeler app, this data is not imported into the
app. Use custom data when gathering label data for training
and combining it with data labeled in the app. |
labelType.Scene | Stored as a logical. |
To add ground truth data that is not in one of the native supported ROIs or a
Scene label category to a groundTruth object, you must provide a label definition with
a labelType that is
Custom. The custom data is not visible when you load
it into the labeling app.
Object Functions
selectLabelsByGroup | Select ground truth labels by label group |
selectLabelsByType | Select ground truth labels by label type |
selectLabelsByName | Select ground truth labels by label name |
changeFilePaths | Change file paths in ground truth data |
gatherLabelData | Gather label data from ground truth |
writeFrames | Write ground truth video frames to disk |
merge | Merge two or more ground truth objects |
Examples
Tips
groundTruthobjects for video-based data sources rely on the video reading capabilities of your operating system. AgroundTruthobject created using a video data source remains consistent only for the same platform that was used to create it. To create a platform-independentgroundTruthobject, convert the video into a sequence of images and include the associated timestamps with the image sequence.
Version History
Introduced in R2017a