epipolarLine
Compute epipolar lines for stereo images
Description
Examples
This example shows you how to compute the fundamental matrix. It uses the least median of squares method to find the inliers.
The points, matched_points1 and matched_points2, have been putatively matched.
load stereoPointPairs [fLMedS,inliers] = estimateFundamentalMatrix(matchedPoints1,... matchedPoints2,'NumTrials',4000);
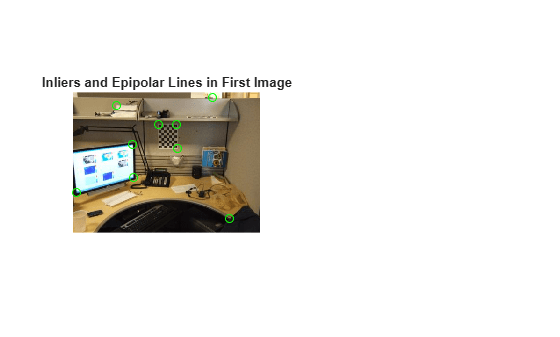
Show the inliers in the first image.
I1 = imread('viprectification_deskLeft.png'); figure; subplot(121); imshow(I1); title('Inliers and Epipolar Lines in First Image'); hold on; plot(matchedPoints1(inliers,1),matchedPoints1(inliers,2),'go')
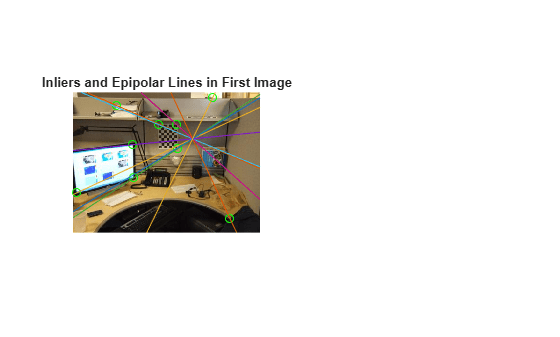
Compute the epipolar lines in the first image.
epiLines = epipolarLine(fLMedS',matchedPoints2(inliers,:));
Compute the intersection points of the lines and the image border.
points = lineToBorderPoints(epiLines,size(I1));
Show the epipolar lines in the first image
line(points(:,[1,3])',points(:,[2,4])');
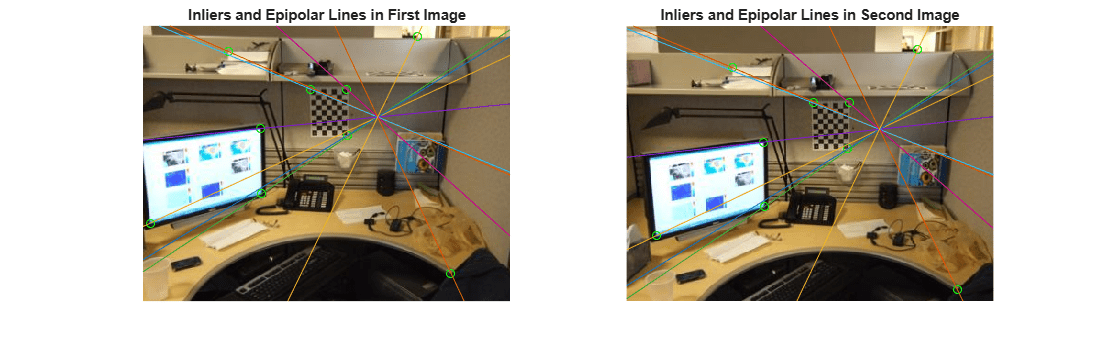
Show the inliers in the second image.
I2 = imread('viprectification_deskRight.png'); subplot(122); imshow(I2); title('Inliers and Epipolar Lines in Second Image'); hold on; plot(matchedPoints2(inliers,1),matchedPoints2(inliers,2),'go')
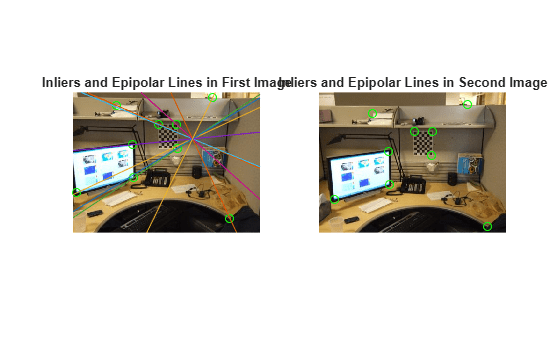
Compute and show the epipolar lines in the second image.
epiLines = epipolarLine(fLMedS,matchedPoints1(inliers,:)); points = lineToBorderPoints(epiLines,size(I2)); line(points(:,[1,3])',points(:,[2,4])'); truesize;