Simple Gear
Simple gear of base and follower wheels with adjustable gear ratio, friction losses, and triggered faults

Libraries:
Simscape /
Driveline /
Gears
Description
The Simple Gear block represents a gearbox that constrains the connected driveline axes of the base gear, B, and the follower gear, F, to corotate with a fixed ratio that you specify. You choose whether the follower axis rotates in the same or opposite direction as the base axis. If they rotate in the same direction, the angular velocity of the follower, ωF, and the angular velocity of the base, ωB, have the same sign. If they rotate in opposite directions, ωF and ωB have opposite signs. You can easily add and remove backlash, faults, and thermal effects.
Ideal Gear Constraint and Gear Ratio
The kinematic constraint that the Simple Gear block imposes on the two connected axes is
where:
rF is the radius of the follower gear.
ωF is the angular velocity of the follower gear.
rB is the radius of the base gear.
ωB is the angular velocity of the base gear.
The follower-base gear ratio is
where:
NB is the number of teeth in the base gear.
NBF is the number of teeth in the follower gear.
Reducing the two degrees of freedom to one independent degree of freedom yields the torque transfer equation
where:
τB is the input torque.
τF is the output torque.
τloss is the torque loss due to friction.
For the ideal case, .
Nonideal Gear Constraint and Losses
In the nonideal case, . For general considerations on nonideal gear modeling, see Model Gears with Losses.
In a nonideal gear pair (B,F), the angular velocity, gear radii, and gear teeth constraints are unchanged. But the transferred torque and power are reduced by:
Coulomb friction between teeth surfaces on gears B and F, characterized by efficiency, η
Viscous coupling of driveshafts with bearings, parametrized by viscous friction coefficients, μ
In the constant efficiency case, η is constant, independent of load or power transferred.
In the load-dependent efficiency case, η depends on the load or power transferred across the gears. For either power flow,
where:
τCoul is the Coulomb friction dependent torque.
k is a proportionality constant.
τidle is the net torque acting on the input shaft in idle mode.
Efficiency, η, is related to τCoul in the standard, preceding form but becomes dependent on load:
Backlash
You can incorporate the effects of backlash in your model. Backlash is the excess space between a gear tooth and the mating gear teeth. Increasing the backlash compensates for lowering manufacturing tolerances and allows the free motion of lubricants in the gears to prevent jamming. However, excess backlash can cause premature wear on your system components and can affect measurements that rely on gear position. The block applies backlash for start-ups and reversals using an implementation of the Translational Hard Stop block.
When you select Enable backlash, the block relates gear rotation to linear backlash as:
where:
vTooth is the relative linear velocity of the gear tooth.
rB is the Base (B) gear radius parameter.
rF is the follower gear radius, where rF = NF/NB·rB, and the Follower (F) to base (B) teeth ratio (NF/NB) parameter represents NF/NB.
ωB and ωF are the angular velocities of the base and follower gears, respectively.
β is the gear direction sign. When you set:
Output shaft rotates to
In same direction as input shaft, β = 1.Output shaft rotates to
In opposite direction as input shaft, β = -1.
The block treats the meshing gear tooth as a position, xTooth, with respect to the linear backlash, Backlash, where -1/2·Backlash < xTooth < 1/2·Backlash. Backlash is equivalent to the Linear backlash parameter. The initial value of the Backlash position variable is equivalent to the initial position of xTooth.
When you set Hard stop model to Based on coefficient of
restitution, the hard stop can incorporate a nonzero value for the
Coefficient of restitution parameter,
coeffrest, into the momentum balance
equation. During a collision,
where t- and t+ are the instants before and after the collision, respectively. The block asserts coeffrest is in the range [0, 1]. For more information, see State Reset Modeling. Simscape™ logs the mode state of the gear as the intermediate M.
| State | Value |
|---|---|
| M = 0 | Disengaged |
| M = 1 | Forwards engaged with xtooth = 1/2·Backlash |
| M = -1 | Backwards engaged with xtooth = -1/2·Backlash |
| M = 2 | Instantaneous mode transition between forward engaged and forward disengaged |
| M = -2 | Instantaneous mode transition between backward engaged and backward disengaged |
| M = 3 | Instantaneous impact mode |
The hard stop simulates static contact at the bounds. The gear locks when a collision occurs and |vTooth| < vtol. Once the gear locks, vTooth = 0. Once fTooth > fTol, the gear unlocks, where
fTol is the Static contact release force threshold parameter.
vtol is the Static contact speed threshold parameter.
fTooth is the meshing force between the gear teeth such that fTooth = TB/rB = TF/rF.
Faults
To model a fault in the Simple Gear block, in the Faults section, click the Add fault hyperlink next to the fault that you want to model. For more information about fault modeling, see Fault Behavior Modeling and Fault Triggering.
When you trigger a fault, the block applies the value of the Faulted efficiency parameter to the range of the gear specified in the Faulted angle range parameter.
Thermal Model
You can model
the effects of heat flow and temperature change by enabling the optional thermal port. To enable
the port, set Friction model to Temperature-dependent
efficiency.
Additionally, you can choose to model efficiency that varies with loading and
temperature by setting Friction model to
Temperature and load-dependent efficiency. Selecting
a thermal variant:
Exposes port H, a conserving port in the thermal domain.
Enables the Thermal mass parameter, which allows you to specify the ability of the component to resist changes in temperature.
Enables the Initial Temperature parameter, which allows you to set the initial temperature.
Variables
Use the Variables settings to set the priority and initial target values for the block variables before simulating. For more information, see Set Priority and Initial Target for Block Variables.
Examples
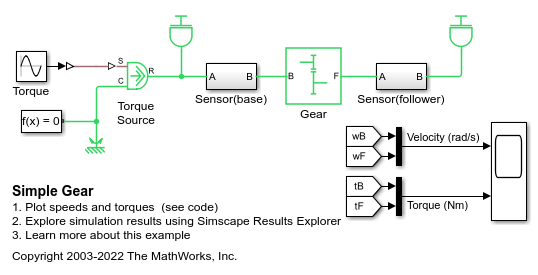
Simple Gear
A simple gear coupling two inertias (shafts). The gear ratio between the follower (F) and base (B) is 2:1. Thus the angular velocity of the follower shaft is half the angular velocity of the base shaft. The follower shaft torque is twice the base shaft torque.
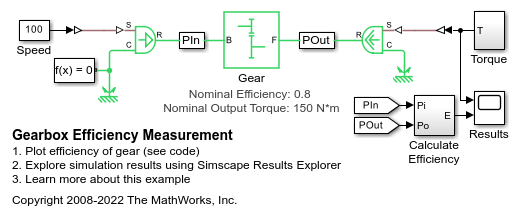
Gearbox Efficiency Measurement
A test for measuring gear box efficiency. The input shaft is driven at a fixed speed and a variable torque is applied to the output shaft. Power is measured on both the input and output shafts, and efficiency is calculated as the ratio of output to input power. The simulation results match the parameters specified for the efficiency of the gear.
Assumptions
Gear inertia is assumed to be negligible.
Gears are treated as rigid components.
Coulomb friction slows down simulation. For more information, see Adjust Model Fidelity.