Variable Ratio Transmission
Dynamic gearbox with variable and controllable gear ratio, transmission compliance, and friction losses

Libraries:
Simscape /
Driveline /
Couplings & Drives
Description
The Variable Ratio Transmission block represents a gearbox that dynamically transfers motion and torque between the two connected driveshaft axes, the base and the follower.
You can choose whether the follower axis rotates in the same or opposite direction as the base axis. If the follower and base axis rotate in the same direction, ωF and ωB have the same sign. If the follower and base axis rotate in opposite directions, ωF and ωB have opposite signs. When the input ratio is positive, the rotating direction of the output shaft is the one you specify. When the ratio is negative, the output shaft rotates in the opposite direction of the input shaft. When the ratio is zero, the two shafts become disengaged and do not transfer torque.
Transmission compliance introduces internal time delay between the axis motions. Unlike a gear, a variable ratio transmission does not act as a kinematic constraint. You can also control the torque loss caused by transmission and viscous losses.
Ideal Motion and Torque Transfer
The Variable Ratio Transmission block dynamically transfers motion and torque between the base shaft and the follower shaft.
If the relative compliance ϕ between the axes is absent, the block is equivalent to a gear with a variable ratio gFB(t). Such a gear imposes a time-dependent kinematic constraint on the motions of the two driveshafts:
However, the Variable Ratio Transmission does include compliance between the axes. Dynamic motion and torque transfer replace the kinematic constraint, with a nonzero ϕ that dynamically responds through the base compliance parameters kp and kv:
where ɑ =
3u2-2u3, and . The function, α, enables smooth transitions
between engaged and disengaged states, and the ratio threshold
gFB,thr determines the magnitude
of the ratio to initiate a transition. When you set Losses
model to No losses — Suitable for HIL
simulation, τloss = 0.
You can estimate the base transmission stiffness, kp, from the transmission time constant tc and inertia J.
You can estimate the base transmission damping kv from the transmission time constant tc, inertia J, and damping coefficient C.
Nonideal Torque Transfer and Losses
When you set Losses model to Constant
efficiency, τloss ≠ 0. The block models losses similarly to nonideal gears. For general
information about nonideal gear modeling, see Model Gears with Losses.
In a nonideal gearbox, the angular velocity and compliance dynamics remain the same as in the ideal case. The transferred torque and power are reduced by:
Coulomb friction, such as the friction between belt and wheel, or internal belt losses due to stretching, characterized by an efficiency η.
Viscous coupling of driveshafts with bearings, parametrized by viscous friction coefficients, μ1 and μ2.
The torque loss in the torque balance equation is due to Coulomb friction, such that
where pthr is the Follower power threshold parameter. The block calculates the viscous shaft frictions as internal damping torques attached to ports B and F, such that
where the total torque is the sum of τB or τF and its respective damping torque.
Examples
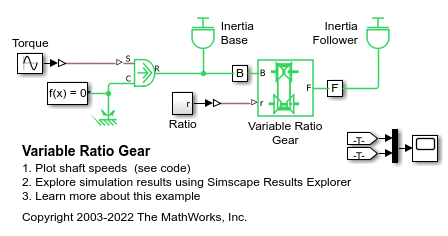
Variable Ratio Gear
A variable ratio gear coupling two inertias (shafts). The gear ratio between the follower (F) and the base (B) is steadily increased from 1:1 to 2:1. The ratio of the follower to base angular speed decreases with gear ratio, and conversely the ratio of the follower to base torque increases with gear ratio. The variable gear is implemented using the Variable Ratio Transmission block which includes compliance. Appropriate stiffness and damping values for the compliance will depend upon the levels of torque transmitted by the variable gear. If the compliance damping is unrealistically low, the system can develop high frequency oscillations that require small simulation time steps.
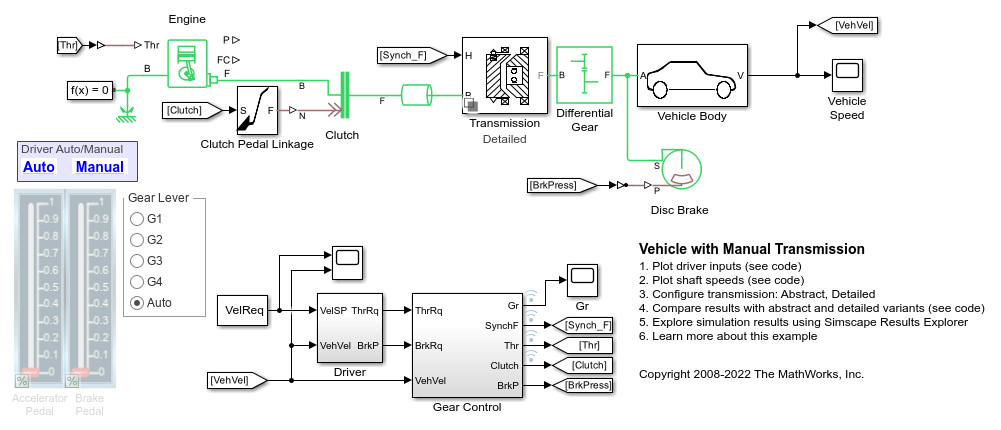
Vehicle with Manual Transmission
A vehicle that has a four-speed manual transmission. The key elements of the transmission are four synchronizers. By engaging or disengaging these synchronizers and associated dog clutches, the transmission provides four ratios 3.581, 2.022, 1.384, and 1, respectively. The synchronizers are modeled using the Cone Clutch and Dog Clutch blocks.