clearCollision
Clear all attached collision geometries
Syntax
Description
Examples
Load a robot model and modify the collision meshes. Clear existing collision meshes, add simple collision object primitives, and check whether certain configurations are in collision.
Load Robot Model
Load a preconfigured robot model into the workspace using the loadrobot function. This model already has collision meshes specified for each body. Iterate through all the rigid body elements and clear the existing collision meshes. Confirm that the existing meshes are gone.
robot = loadrobot("kukaIiwa7",DataFormat="column"); for i = 1:robot.NumBodies clearCollision(robot.Bodies{i}) end show(robot,Collisions="on",Visuals="off");
Add Collision Cylinders
Iteratively add a blue collision cylinder to each body and set the transparency to opaque. Skip some bodies for this specific model, as they overlap and always collide with the end effector (body 10).
collisionObj = collisionCylinder(0.05,0.25); for i = 1:robot.NumBodies if i > 6 && i < 10 % Skip these bodies. else addCollision(robot.Bodies{i}, collisionObj, FaceColor=[0 0 1], FaceAlpha=1) end end show(robot,Collisions="on",Visuals="off");
Check for Collisions
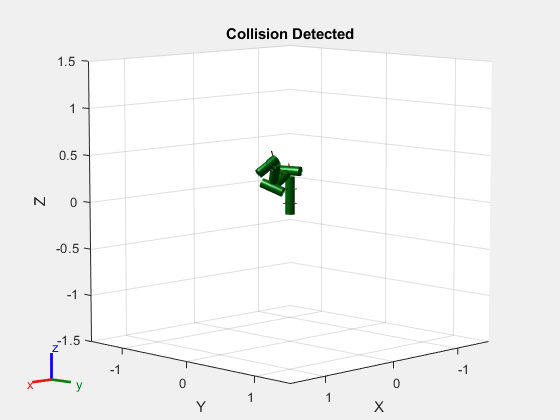
Generate a series of random configurations. Check whether the robot is in collision at each configuration. Visualize each configuration that has a collision.
figure rng(0) % Set random seed for repeatability. for i = 1:20 config = randomConfiguration(robot); isColliding = checkCollision(robot,config,SkippedSelfCollisions="parent"); if isColliding show(robot,config,Collisions="on",Visuals="off"); title("Collision Detected") else % Skip non-collisions. end end
Input Arguments
Extended Capabilities
Version History
Introduced in R2020b