optimize
Syntax
Description
The optimize object function optimizes a trajectory for
both smoothness and collision avoidance using Covariant Hamiltonian Optimization
for Motion Planning (CHOMP), a gradient-descent based planner. To change the
weights of the smoothness costs and the collision costs, set the
SmoothnessOptions, CollisionOptions, and
SolverOptions properties of the manipulatorCHOMP
object. The function also assumes that both the environment and the collision geometry of the
rigid body tree robot model are approximated as collision spheres.
[
optimizes the trajectory specified by the waypoints optimtraj,timesamples] = optimize(manipCHOMP,wpts,tpts,timestep)wpts at times
tpts, and using the Covariant Hamiltonian Optimization for Motion
Planning (CHOMP) algorithm, outputs the optimized waypoints optimtraj
at the sample times timesamples. The initial trajectory fit between
waypoints at their respective times is linear interpolation.
[
specifies a trajectory type optimtraj,timesamples] = optimize(manipCHOMP,wpts,tpts,timestep,InitialTrajectoryFit=fittype)fittype for the initial trajectory
fitting.
[___,
returns solution information from the optimization.solninfo] = optimize(___)
Examples
Load a robot model into the workspace, and create a CHOMP solver.
robot = loadrobot("kinovaGen3",DataFormat="row"); chomp = manipulatorCHOMP(robot);
Create spheres to represent obstacles, and add them to the CHOMP solver.
env = [0.20 0.2 -0.1 -0.1; % sphere, radius 0.20 at (0.2,-0.1,-0.1) 0.15 0.2 0.0 0.5]'; % sphere, radius 0.15 at (0.2,0.0,0.5) chomp.SphericalObstacles = env;
To prioritize a collision-free trajectory, set the smoothness cost weight to a lower value than the collision cost weight. Then add the options to the CHOMP solver.
chomp.SmoothnessOptions = chompSmoothnessOptions(SmoothnessCostWeight=1e-3);
chomp.CollisionOptions = chompCollisionOptions(CollisionCostWeight=10);
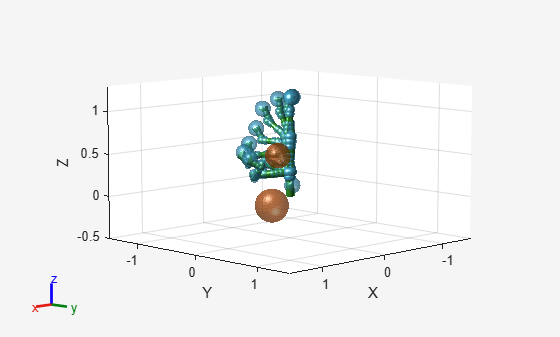
chomp.SolverOptions = chompSolverOptions(Verbosity="none",LearningRate=7.0);Initialize a trajectory, optimize it using the CHOMP solver, and show the waypoints in a figure.
startconfig = homeConfiguration(robot); goalconfig = [0.5 1.75 -2.25 2.0 0.3 -1.65 -0.4]; timepoints = [0 5]; timestep = 0.1; trajtype = "minjerkpolytraj"; [wptsamples,tsamples] = optimize(chomp, ... [startconfig; goalconfig], ... timepoints, ... timestep, ... InitialTrajectoryFitType=trajtype); show(chomp,wptsamples,NumSamples=10); zlim([-0.5 1.3])
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2023a