show
Description
The show object function shows one or more
configuration trajectories in a Covariant Hamiltonian Optimization for Motion
Planning (CHOMP) environment with obstacles. CHOMP is a gradient-descent based
planner that plans and optimizes trajectories for smoothness and collision avoidance. For more
information about CHOMP, see the manipulatorCHOMP
or dlCHOMP
object.
show( visualizes the rigid body tree
in its home configuration in a CHOMP environment.chomp)
[___] = show(___,
specifies additional options using one or more name-value arguments.Name=Value)
Examples
Load a robot model into the workspace, and create a CHOMP solver.
robot = loadrobot("kinovaGen3",DataFormat="row"); chomp = manipulatorCHOMP(robot);
Create spheres to represent obstacles, and add them to the CHOMP solver.
env = [0.20 0.2 -0.1 -0.1; % sphere, radius 0.20 at (0.2,-0.1,-0.1) 0.15 0.2 0.0 0.5]'; % sphere, radius 0.15 at (0.2,0.0,0.5) chomp.SphericalObstacles = env;
To prioritize a collision-free trajectory, set the smoothness cost weight to a lower value than the collision cost weight. Then add the options to the CHOMP solver.
chomp.SmoothnessOptions = chompSmoothnessOptions(SmoothnessCostWeight=1e-3);
chomp.CollisionOptions = chompCollisionOptions(CollisionCostWeight=10);
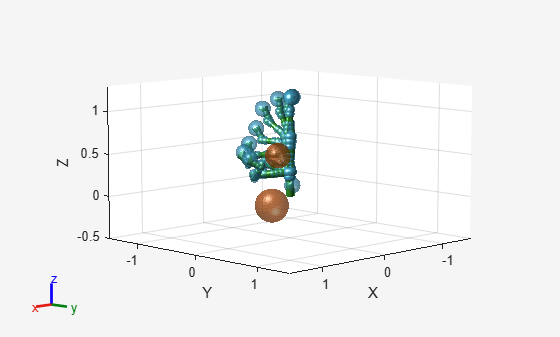
chomp.SolverOptions = chompSolverOptions(Verbosity="none",LearningRate=7.0);Initialize a trajectory, optimize it using the CHOMP solver, and show the waypoints in a figure.
startconfig = homeConfiguration(robot); goalconfig = [0.5 1.75 -2.25 2.0 0.3 -1.65 -0.4]; timepoints = [0 5]; timestep = 0.1; trajtype = "minjerkpolytraj"; [wptsamples,tsamples] = optimize(chomp, ... [startconfig; goalconfig], ... timepoints, ... timestep, ... InitialTrajectoryFitType=trajtype); show(chomp,wptsamples,NumSamples=10); zlim([-0.5 1.3])
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2023a