collisionSphere
Create sphere collision geometry
Description
Use collisionSphere to create a sphere collision geometry with
the origin of the geometry-fixed frame at the center of the sphere.
Creation
Description
SPH = collisionSphere( creates a
sphere collision geometry with a specified Radius centered at
the origin of the world frame. The origin of the geometry-fixed frame is at the center
of the sphere.Radius)
SPH = collisionSphere(___,Pose=
sets the pose)Pose property of the sphere to pose,
relative to the world frame.
Properties
Object Functions
checkCollision | Check if two geometries are in collision |
convertToCollisionMesh | Convert collision primitive geometry into collision mesh geometry |
fitCollisionCapsule | Fit collision capsule around collision geometry |
show | Show collision geometry |
Examples
Create a sphere collision geometry centered at the origin. The sphere has a radius of 1 meter.
rad = 1; sph = collisionSphere(rad)
sph =
collisionSphere with properties:
Radius: 1
Pose: [4×4 double]
Visualize the sphere.
show(sph)
title("Sphere")
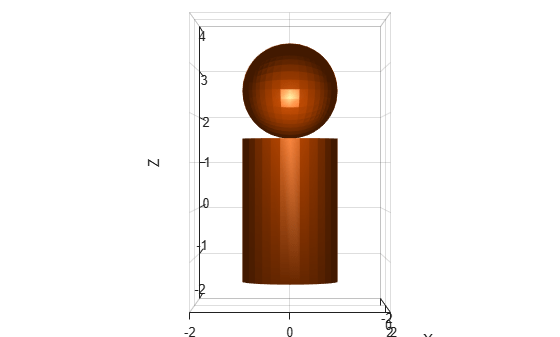
Create a cylinder collision geometry of radius 1 meter and length 3 meters.
cyl = collisionCylinder(1,3);
Create a homogeneous transformation that corresponds to a translation of 2.5 meters up the z-axis. Set the pose of the sphere to the matrix. Show the sphere and the cylinder.
mat = trvec2tform([0 0 2.5]);
sph.Pose = mat;
show(sph)
hold on
show(cyl)
view(90,0)
zlim([-2 4])