collisionCylinder
Create collision cylinder geometry
Description
Use collisionCylinder to create a cylinder collision geometry
that is axis-aligned with the z-axis of its body-fixed frame and has the
origin of the body-fixed frame at the center of the cylinder.
Creation
Description
CYL = collisionCylinder(___,Pose=
sets the pose)Pose property of the cylinder to
pose, relative to the world frame.
Properties
Object Functions
checkCollision | Check if two geometries are in collision |
convertToCollisionMesh | Convert collision primitive geometry into collision mesh geometry |
fitCollisionCapsule | Fit collision capsule around collision geometry |
show | Show collision geometry |
Examples
Create a cylinder collision geometry centered at the origin. The cylinder is 4 meters long with a radius of 1 meter.
rad = 1; len = 4; cyl = collisionCylinder(rad,len)
cyl =
collisionCylinder with properties:
Radius: 1
Length: 4
Pose: [4×4 double]
Visualize the cylinder.
show(cyl)
title("Cylinder")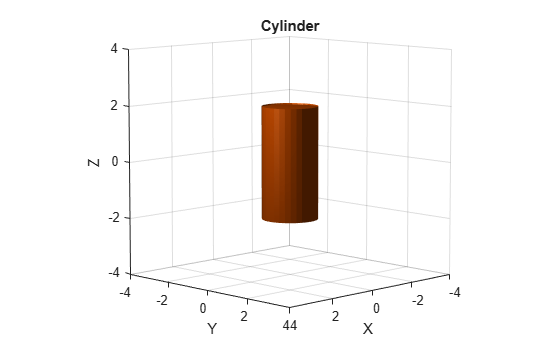
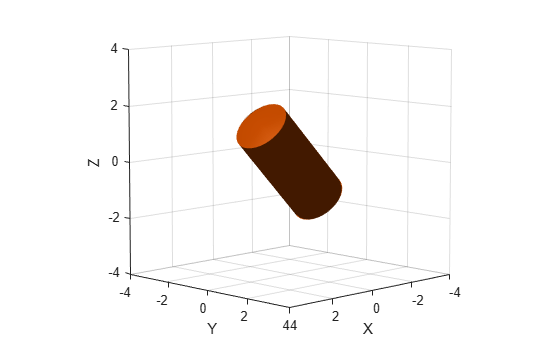
Create a homogeneous transformation that corresponds to a clockwise rotation of radians about the y-axis. Set the cylinder pose to the new matrix. Show the cylinder.
ang = pi/4; mat = axang2tform([0 1 0 ang]); cyl.Pose = mat; show(cyl)