pcsemanticseg
Syntax
Description
[___] = pcsemanticseg(___,
specifies options using one or more name-value arguments. For example,
Name=Value)OutputType="double" returns the segmentation results as numeric array
of data type double.
Examples
Load a pretrained network into the workspace. This network segments vehicles from the input point cloud.
data = load("pointCloudVehicleSegmentationNetwork.mat");
net = data.netnet =
dlnetwork with properties:
Layers: [79×1 nnet.cnn.layer.Layer]
Connections: [86×2 table]
Learnables: [90×3 table]
State: [44×3 table]
InputNames: {'Organized-Point-Cloud-Input'}
OutputNames: {'softmax'}
Initialized: 1
View summary with summary.
Load the test point cloud data.
dataDir = fullfile(toolboxdir("lidar"),"lidardata", ... "sampleWPIPointClouds","pointClouds","010.pcd");
Read and display the test point cloud.
ptCloud = pcread(dataDir); figure pcshow(ptCloud.Location)

Display the intensity channel of the point cloud.
figure imshow(uint8(ptCloud.Intensity))

Preprocess the point cloud data and perform semantic segmentation.
pc = cat(3,ptCloud.Location,ptCloud.Intensity); [C,scores] = pcsemanticseg(pc,net);
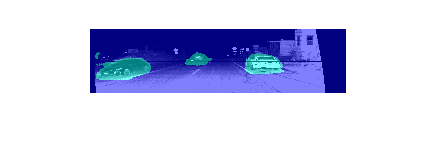
Overlay the segmentation results on the intensity channel and display the results.
B = labeloverlay(uint8(ptCloud.Intensity),C); figure imshow(B)
Load a pretrained network into the workspace. This network segments vehicles from the input point cloud.
data = load("pointCloudVehicleSegmentationNetwork.mat");
net = data.net;Load the test point cloud data, and create a file datastore.
dataDir = fullfile(toolboxdir("lidar"),"lidardata","sampleWPIPointClouds"); testDataDir = fullfile(dataDir,"pointClouds"); ptCloudDs = fileDatastore(testDataDir,ReadFcn=@pcread);
Concatenate the intensity channel values to the datastore.
pcds = transform(ptCloudDs,@(ptCloud)cat(3,ptCloud.Location,ptCloud.Intensity));
Load the ground truth labels.
testLabelDir = fullfile(dataDir,"segmentationLabels");
pldsTruth = fileDatastore(testLabelDir,ReadFcn=@(x)load(x).labels);
classes = categories(read(pldsTruth));Perform semantic segmentation on all the test point clouds.
pldsResults = pcsemanticseg(pcds,net,Classes=classes,WriteLocation=tempdir);
Running semantic segmentation network ------------------------------------- * Processed 10 point clouds.
Compare the results against the ground truth labels.
metrics = evaluateSemanticSegmentation(pldsResults,pldsTruth)
Evaluating semantic segmentation results
----------------------------------------
* Selected metrics: global accuracy, class accuracy, IoU, weighted IoU, BF score.
* Processed 10 images.
* Finalizing... Done.
* Data set metrics:
GlobalAccuracy MeanAccuracy MeanIoU WeightedIoU MeanBFScore
______________ ____________ _______ ___________ ___________
0.94751 0.9723 0.67226 0.92655 0.47675
metrics =
semanticSegmentationMetrics with properties:
ConfusionMatrix: [2×2 table]
NormalizedConfusionMatrix: [2×2 table]
DataSetMetrics: [1×5 table]
ClassMetrics: [2×3 table]
ImageMetrics: [10×5 table]
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022b
See Also
Functions
semanticseg|segmentAerialLidarVegetation|segmentAerialLidarBuildings|evaluateSemanticSegmentation|squeezesegv2Network|pointnetplusNetwork|pointCloudInputLayer|segmentObjects|trainRandlanet|segmentAnythingAerialLidar|pcsegsam
Objects
Topics
- Aerial Lidar Semantic Segmentation Using PointNet++ Deep Learning
- Lidar Point Cloud Semantic Segmentation Using SqueezeSegV2 Deep Learning Network
- Getting Started with Point Clouds Using Deep Learning
- List of Deep Learning Layers (Deep Learning Toolbox)
- Datastores for Deep Learning (Deep Learning Toolbox)