atan2
Four-quadrant inverse tangent of fixed-point values
Syntax
Description
Examples
Input Arguments
Output Arguments
More About
Algorithms
The atan2 function computes the four-quadrant arctangent of
fixed-point inputs using an 8-bit lookup table as follows:
Divide the input absolute values to get an unsigned, fractional, fixed-point, 16-bit ratio between 0 and 1. The absolute values of y and x determine which value is the divisor.
The signs of the
yandxinputs determine in what quadrant their ratio lies. The input with the larger absolute value is used as the denominator, thus producing a value between 0 and 1.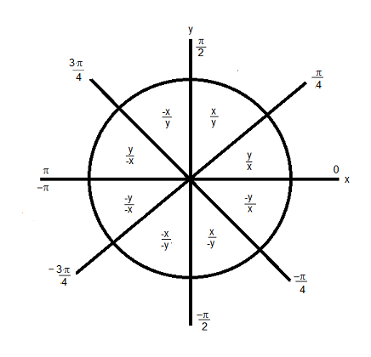
Compute the table index, based on the 16-bit, unsigned, stored integer value:
Use the 8 most-significant bits to obtain the first value from the table.
Use the next-greater table value as the second value.
Use the 8 least-significant bits to interpolate between the first and second values using nearest neighbor linear interpolation. This interpolation produces a value in the range [0, pi/4).
Perform octant correction on the resulting angle, based on the values of the original
yandxinputs.
This arctangent calculation is accurate only to within the top 16 most-significant bits of the input.
Extended Capabilities
Version History
Introduced in R2012a
See Also
atan2 | sin | angle | cos | cordicatan2