Choose a Sensor for Unreal Engine Simulation
In Automated Driving Toolbox™, you can obtain high-fidelity sensor data from a virtual environment. This environment is rendered using the Unreal Engine® from Epic Games®.
Simulating models in the 3D visualization environment requires Simulink® 3D Animation™.
The table summarizes the sensor blocks that you can simulate in this environment.
| Sensor Block | Description | Visualization | Example |
|---|---|---|---|
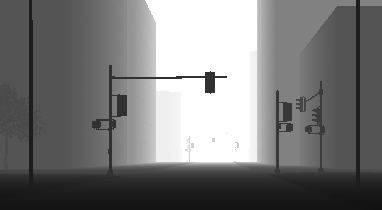
| Display camera images by using a Video Viewer or To Video Display block. Sample visualization:
| Design Lane Marker Detector Using Unreal Engine Simulation Environment | |
Display depth maps by using a Video Viewer or To Video Display block. Sample visualization:
| Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation | ||
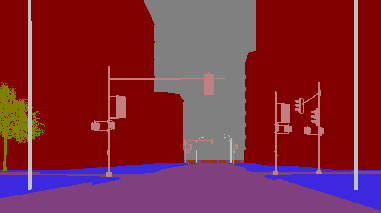
Display semantic segmentation maps by using a Video Viewer or To Video Display block. Sample visualization:
| Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation | ||
| Display camera images by using a Video Viewer or To Video Display block. Sample visualization:
| Simulate Simple Driving Scenario and Sensor in Unreal Engine Environment | |
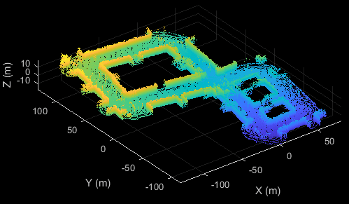
| Display point cloud data by using
| Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment | |
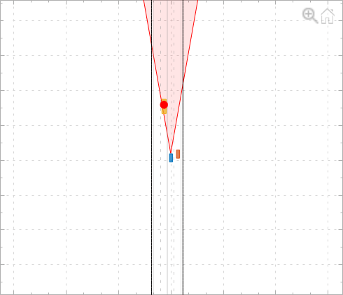
Display lidar coverage areas and detections by using the Bird's-Eye Scope. Sample visualization:
| Visualize Sensor Data from Unreal Engine Simulation Environment | ||
| Display radar coverage areas and detections by using the Bird's-Eye Scope. Sample visualization:
| Simulate Vision and Radar Sensors in Unreal Engine Environment Visualize Sensor Data from Unreal Engine Simulation Environment | |
| Simulation 3D Vision Detection Generator |
| Display vision coverage areas and detections by using the Bird's-Eye Scope. Sample visualization:
| Simulate Vision and Radar Sensors in Unreal Engine Environment |
| Simulation 3D Ultrasonic Sensor |
| Display ultrasonic range coverage areas and range detections by
using the Bird's-Eye Scope. Sample visualization: |





See Also
Blocks
- Simulation 3D Scene Configuration | Simulation 3D Vehicle with Ground Following | Simulation 3D Probabilistic Radar Configuration