plot
Plot path planned by RRT* path planner
Description
plot( plots the path planned by
the input planner)pathPlannerRRT object. When specified as an input to the plan
function, this object plans a path using the rapidly exploring random tree (RRT*)
algorithm. If a path has not been planned using plan, or if
properties of the pathPlannerRRT planner have changed since using
plan, then plot displays only the costmap
of planner.
plot(
specifies options using one or more name-value pair arguments. For example,
planner,Name,Value)plot(planner,'Tree','on') plots the poses explored by the
RRT* path planner.
Examples
Plan a vehicle path to a parking spot by using the RRT* algorithm.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmapReducedInflation.mat');
costmap = data.parkingLotCostmapReducedInflation;
plot(costmap)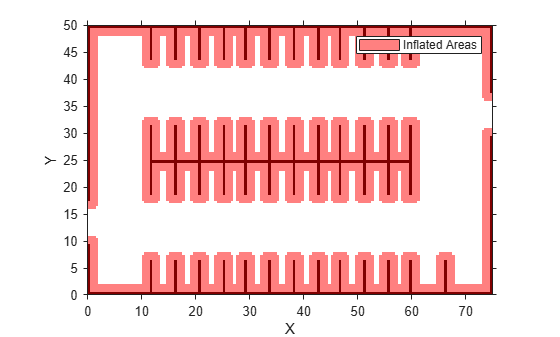
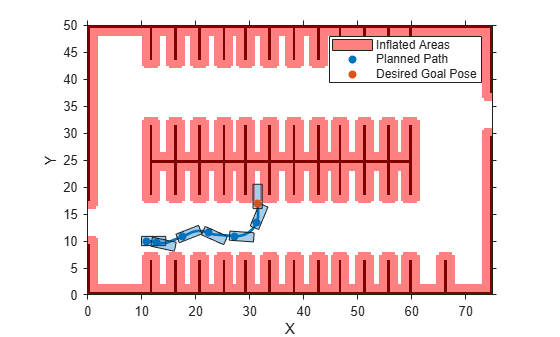
Define start and goal poses for the path planner as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation values are in degrees.
startPose = [11, 10, 0]; % [meters, meters, degrees]
goalPose = [31.5, 17, 90];Create an RRT* path planner to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Plot the planned path.
plot(planner)
Input Arguments
Name-Value Arguments
Version History
Introduced in R2018a