plan
Plan vehicle path using RRT* path planner
Description
refPath = plan(planner,startPose,goalPose)startPose to
goalPose using the input pathPlannerRRT object. This object configures an optimal rapidly
exploring random tree (RRT*) path planner.
Examples
Plan a vehicle path to a parking spot by using the RRT* algorithm.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmapReducedInflation.mat');
costmap = data.parkingLotCostmapReducedInflation;
plot(costmap)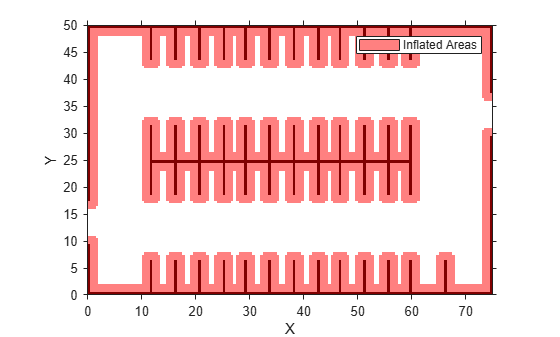
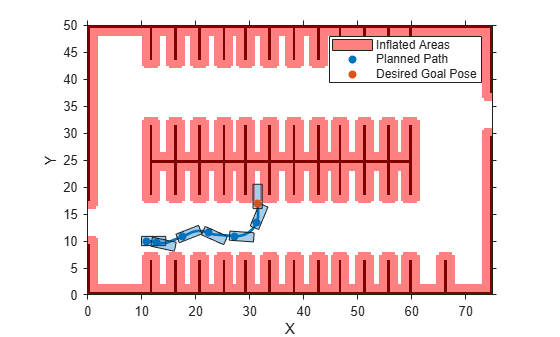
Define start and goal poses for the path planner as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation values are in degrees.
startPose = [11, 10, 0]; % [meters, meters, degrees]
goalPose = [31.5, 17, 90];Create an RRT* path planner to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Plot the planned path.
plot(planner)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2018a