Modeling
Prepare Simulink model for hardware connection, and add blocks to support NVIDIA hardware.
Blocks
Model Settings
Topics
- Model Configuration Parameters for NVIDIA Hardware Board
Parameter and configuration options for creating and running applications on an NVIDIA hardware board.
- Open Block Library for NVIDIA Hardware
Locate Simulink block library for NVIDIA hardware.
- Accelerate Simulation Speed by Using GPU Coder (GPU Coder)
Achieve faster simulation for models that contain MATLAB Function blocks.
- Code Generation from Simulink Models with GPU Coder (GPU Coder)
Generate CUDA® code from Simulink models by using GPU Coder™.
- GPU Code Generation for Deep Learning Networks Using MATLAB Function Block (GPU Coder)
Simulate and generate code for deep learning models in Simulink using MATLAB Function blocks.
- GPU Code Generation for Blocks from the Deep Neural Networks Library (GPU Coder)
Simulate and generate code for deep learning models in Simulink using library blocks.
- Connecting and Using USB to Serial Converter with Jetson
Connecting the USB to serial converter to a NVIDIA Jetson™ board.
- Serial Port Mapping for NVIDIA Jetson Boards
Identify the port names for the serial ports on NVIDIA Jetson boards.
- Read and Write Data over Serial Port on NVIDIA Jetson Platforms
This example shows how to use MATLAB® Coder™ Support Package for NVIDIA® Jetson® and NVIDIA DRIVE® to read and write serial data over the UART port on a Jetson board.
- Introduction to MQTT
Basics of the MQTT messaging protocol.
Featured Examples
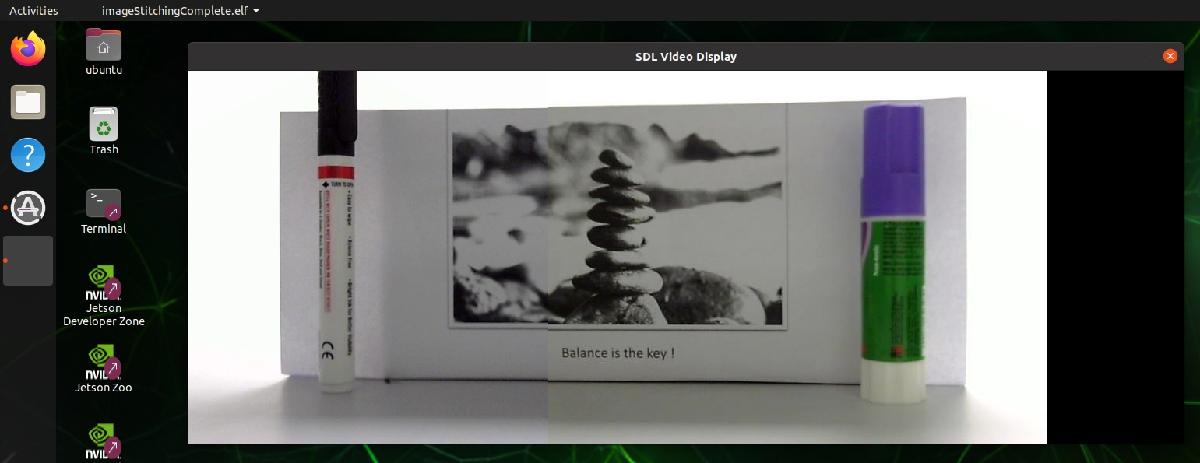
Capture and Stitch Together Images from Multiple Cameras on NVIDIA Jetson
Capture video from two cameras on an NVIDIA Jetson to create a composite image.

Deploy and Classify Webcam Images on NVIDIA Jetson Platform from Simulink
Deploy a Simulink® model on the NVIDIA® Jetson™ board for classifying webcam images. This example classifies images from a webcam in real-time by using the pretrained deep convolutional neural network, ResNet-50. The Simulink model in the example uses the camera and display blocks from the MATLAB® Coder™ Support Package for NVIDIA Jetson and NVIDIA DRIVE™ Platforms to capture the live video stream from a webcam and display the prediction results on a monitor connected to the Jetson platform.

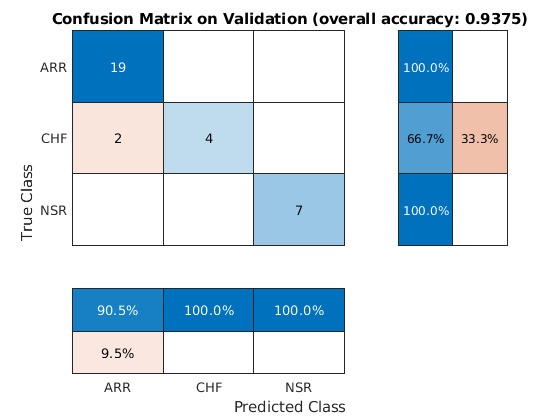
Code Generation for a Deep Learning Simulink Model to Classify ECG Signals
Demonstrates how you can use powerful signal processing techniques and Convolutional Neural Networks together to classify ECG signals. We will also showcase how CUDA® code can be generated from the Simulink® model. This example uses the pretrained CNN network from the Classify Time Series Using Wavelet Analysis and Deep Learning example of the Wavelet Toolbox™ to classify ECG signals based on images from the CWT of the time series data. For information on training, see Classify Time Series Using Wavelet Analysis and Deep Learning (Wavelet Toolbox).
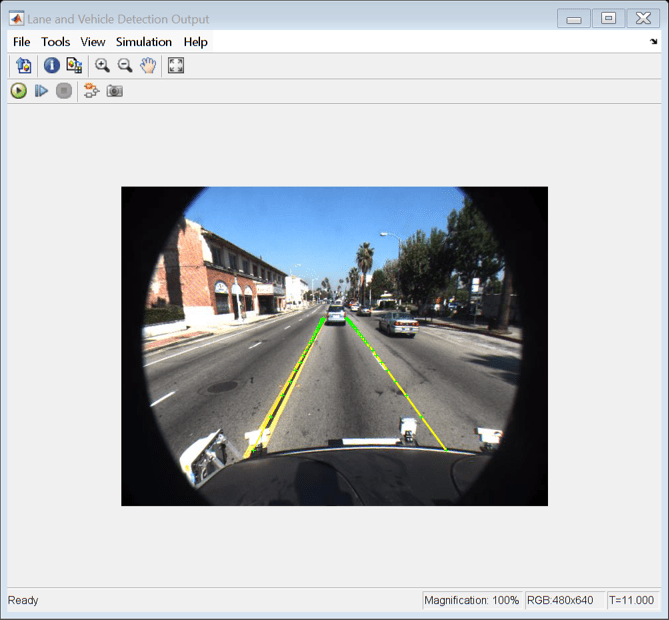
Code Generation for a Deep Learning Simulink Model That Performs Lane and Vehicle Detection
Develop a CUDA® application from a Simulink® model that performs lane and vehicle detection using convolutional neural networks (CNN). This example takes the frames of a traffic video as an input, outputs two lane boundaries that correspond to the left and right lanes of the ego vehicle, and detects vehicles in the frame. This example uses the pretrained lane detection network from the Lane Detection Optimized with GPU Coder example of the GPU Coder™ product. For more information, see Lane Detection Optimized with GPU Coder (GPU Coder). This example also uses the pretrained vehicle detection network from the Object Detection Using YOLO v2 Deep Learning example of the Computer Vision Toolbox™. For more information, see Object Detection Using YOLO v2 Deep Learning (Computer Vision Toolbox).
Deploy Signal Classifier on NVIDIA Jetson Using Wavelet Analysis and Deep Learning
Generate and deploy a CUDA® executable that classifies human electrocardiogram (ECG) signals using features extracted by the continuous wavelet transform (CWT) and a pretrained convolutional neural network (CNN).

CAN Bus Communication on NVIDIA Jetson TX2 in Simulink
Deploy a Simulink® model that uses CAN communication for a deep learning application. The Simulink model in this example uses the CAN Transmit and CAN Receive blocks from the MATLAB® Coder™ Support Package for NVIDIA® Jetson® and NVIDIA DRIVE® Platforms to model a CAN bus system on the Jetson TX2 platform. The model uses the CAN bus to transmit the recognized traffic sign objects in a video frame from one CAN node to another CAN node.
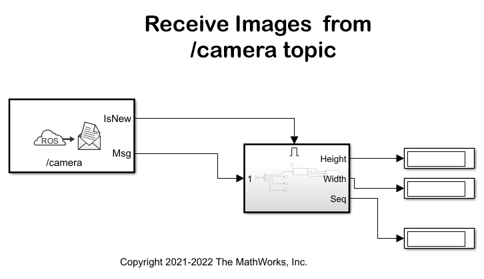
Stream Images from NVIDIA Jetson Xavier NX Using Robot Operating System (ROS)
Stream images captured from a webcam on NVIDIA® Jetson™ Xavier NX board to the host computer using ROS communication interface.

Send and Receive Data over UDP on NVIDIA Jetson Platforms
Use MATLAB® Coder™ Support Package for NVIDIA® Jetson® and NVIDIA DRIVE® to send and receive UDP data over the network on a Jetson board.
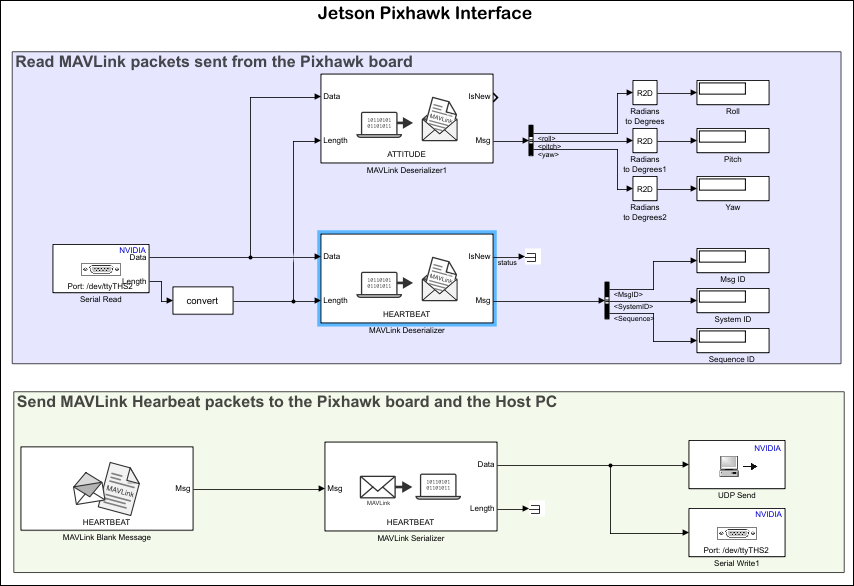
Send and Receive MAVLink Packets on Jetson Boards
Use MATLAB® Coder™ Support Package for NVIDIA® Jetson® and NVIDIA DRIVE® to send and receive MAVLink packets on a Jetson board via serial from a Pixhawk® board.
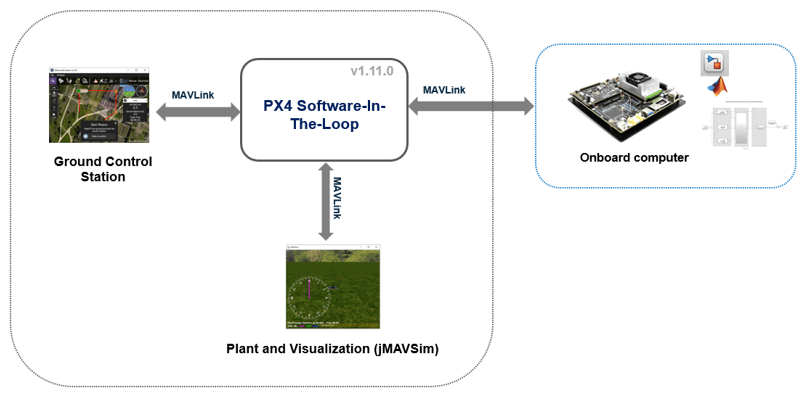
Onboard Computer Path Planning Interface for PX4 SITL Deployable on NVIDIA Jetson
Demonstrates enabling and interfacing onboard computer path planning with PX4® Software-in-the-Loop (SITL).
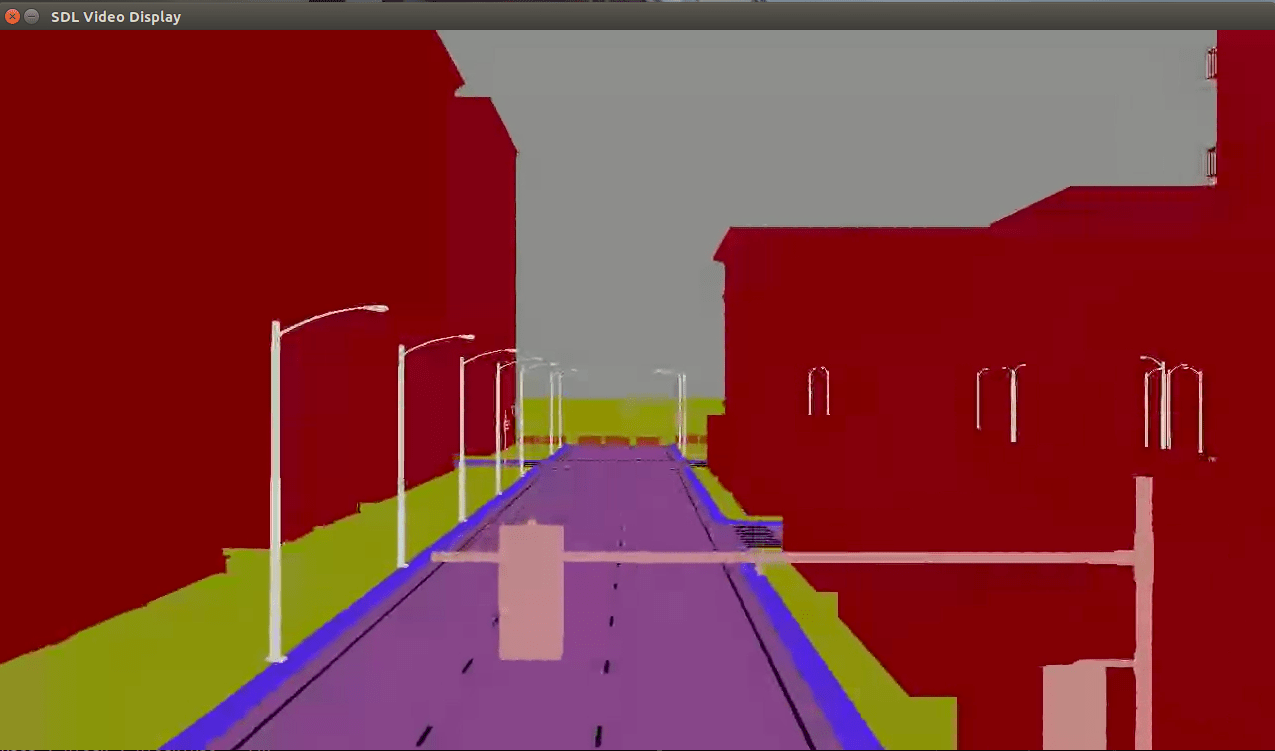
Stream Camera, Depth and Semantic Segmentation Data from Unreal Engine to NVIDIA Jetson
Stream simulated camera, depth, and semantic segmentation label data from an Unreal Engine® scene to NVIDIA® Jetson™ hardware using the Video Send block in Simulink®. It then shows how to visualize incoming data streams on a monitor connected to the Jetson platform, by deploying separate models for each incoming data stream. The deployed models contain the Network Video Receive and SDL Video Display blocks from the MATLAB® Coder™ Support Package for NVIDIA Jetson and NVIDIA DRIVE® Platforms.
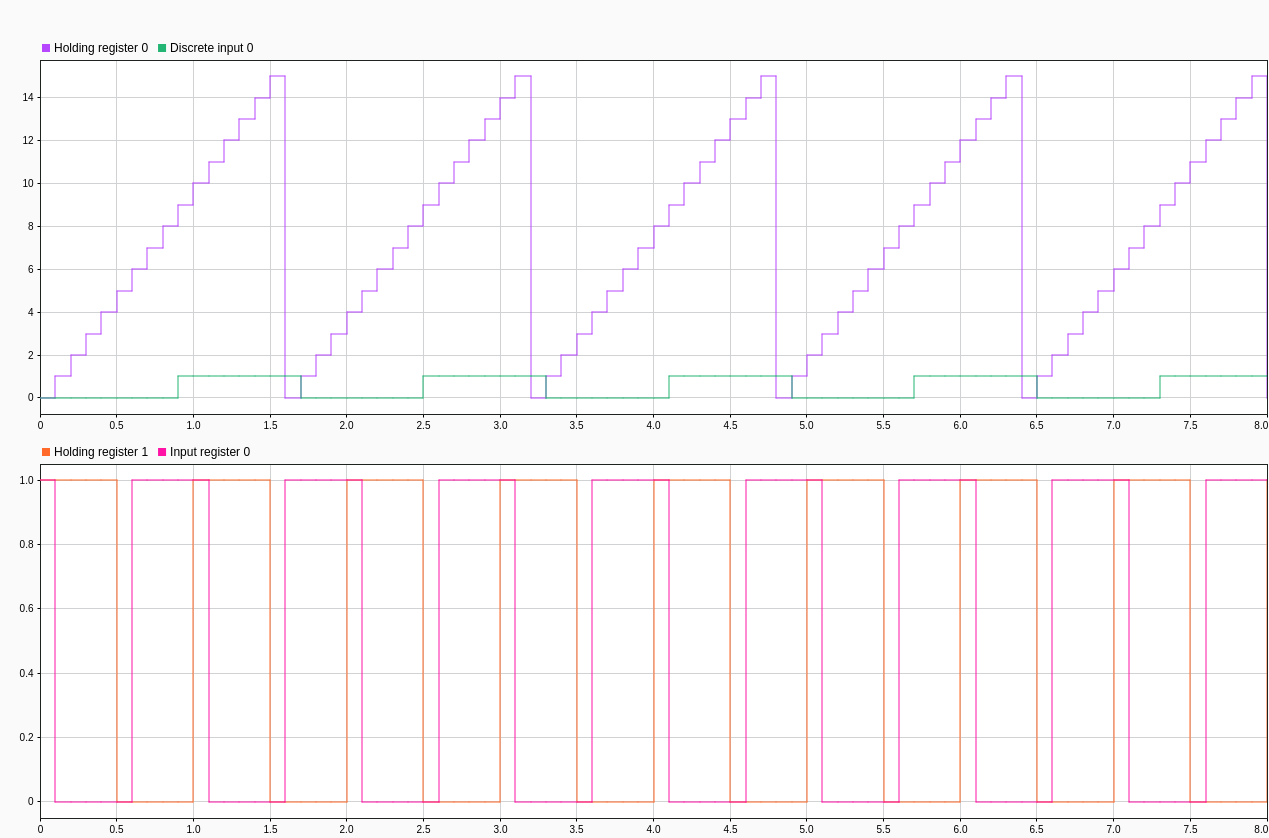
MODBUS TCP/IP Communication Between Client and Server Devices Using NVIDIA Jetson TX2 Hardware
Use the MATLAB® Coder™ Support Package for NVIDIA® Jetson® and NVIDIA DRIVE® Platforms to implement MODBUS® TCP/IP communication between MODBUS client and server devices. It also shows how to communicate between the two devices in four modes of operation, Client Read, Client Write, Server Read, and Server Write.
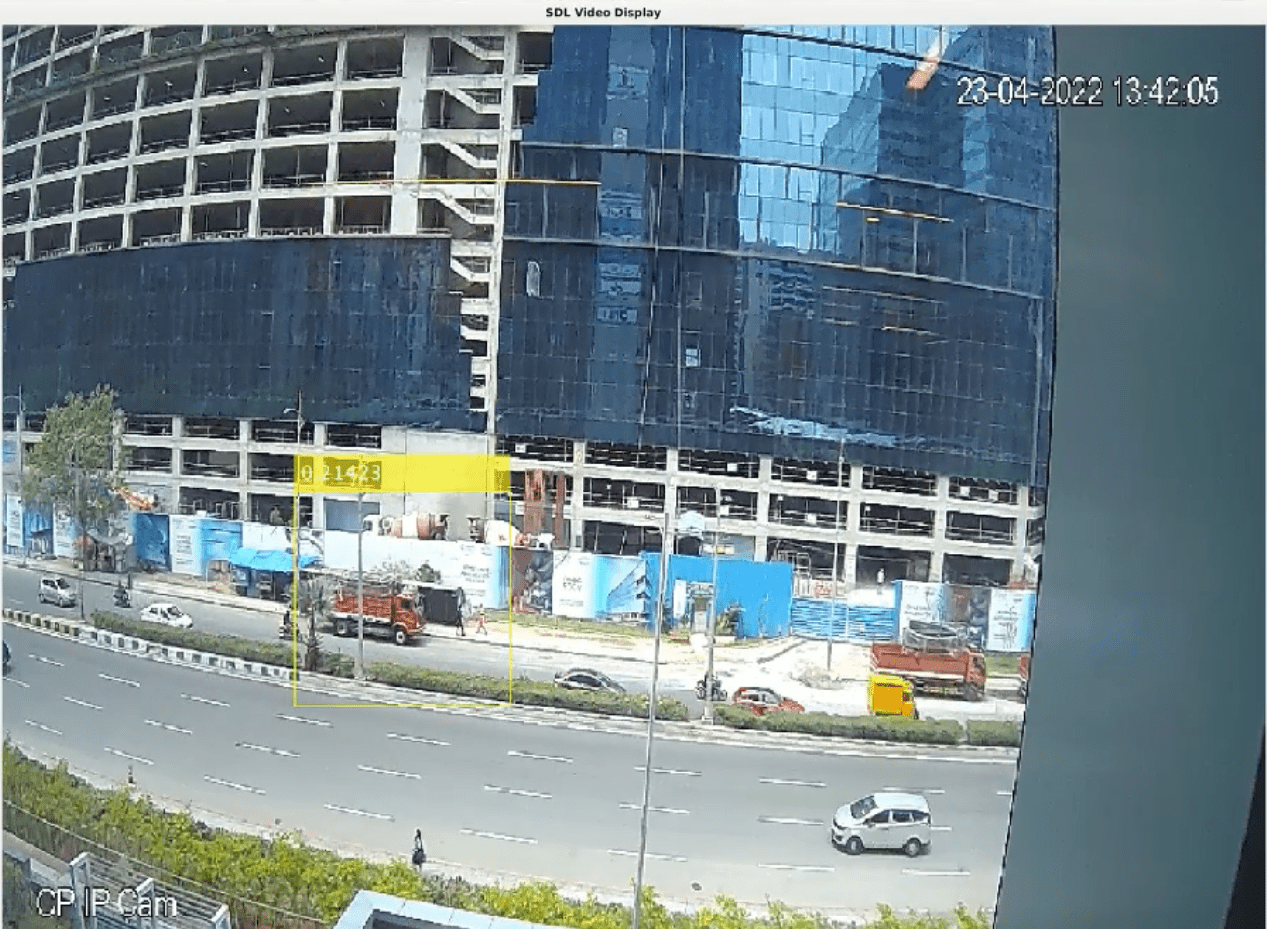
Deep Learning Vehicle Detector from IP Camera Stream on Jetson
Develop a CUDA® application from a Simulink® model that performs vehicle detection using convolutional neural networks (CNN). This example takes the IP camera stream as an input and detects vehicles in the frame. This example uses the pretrained vehicle detection network from the Object Detection Using YOLO v2 Deep Learning example of the Computer Vision Toolbox™. For more information, see Object Detection Using YOLO v2 Deep Learning (Computer Vision Toolbox).
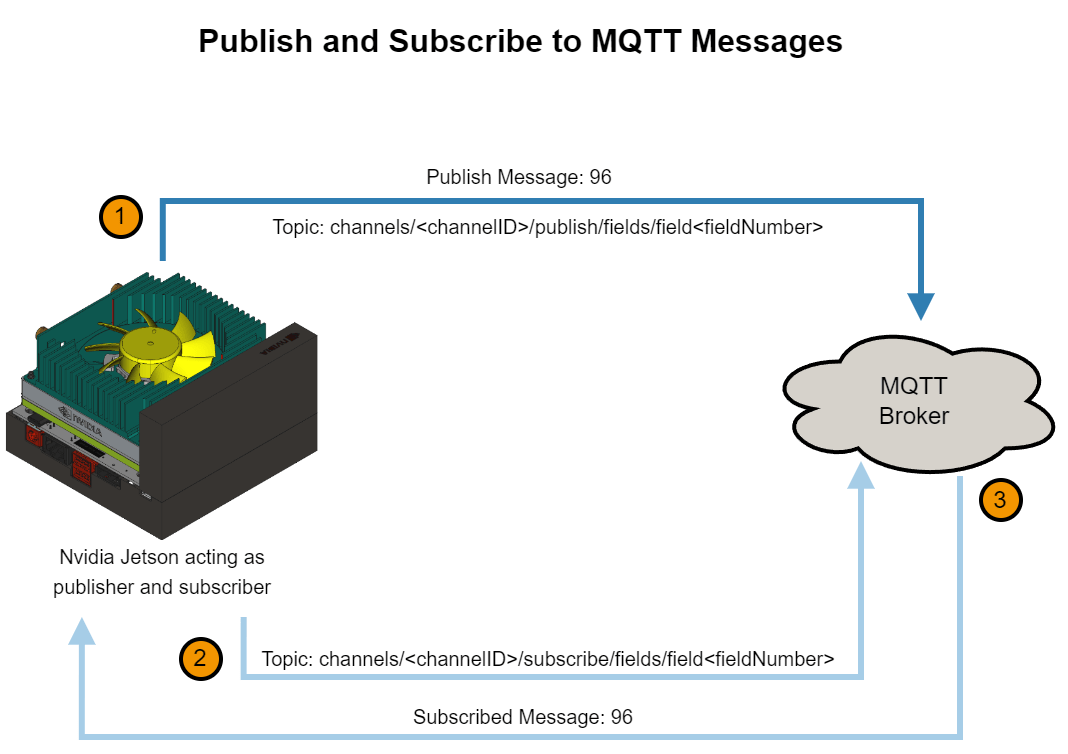
Publish and Subscribe to Messages on ThingSpeak Using MQTT Blocks
Use Simulink blocks to communicate using Message Queuing Telemetry Transport (MQTT) on NVIDIA Jetson or NVIDIA DRIVE®.
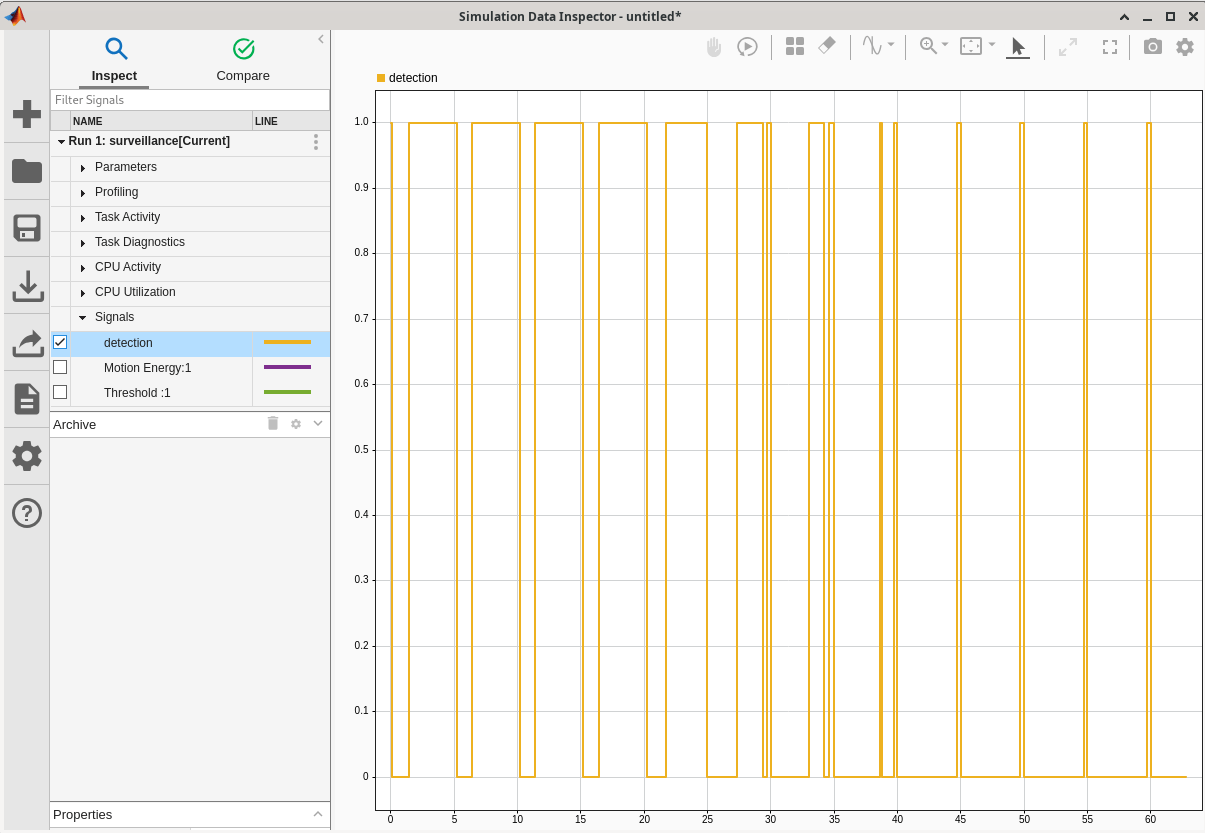
Tune Motion Detection Algorithm Running on NVIDIA Jetson
Monitor and tune a Simulink model that implements a motion detection algorithm.