MAVLink Support
The Micro Air Vehicle Link (MAVLink) communication protocol is a message protocol for sending and receiving messages between UAVs. The protocol uses a publish-subscribe pattern for data streams with specified topics and message types. There are different sub-protocols for missions and parameters. Use the MAVLink supported functions to specify predefined or custom dialects, setup clients, and send or receive messages.
To protect UAVs from unauthorized messages, MAVLink uses message signing. Note that message signing is not the same as message encryption and MAVLink does not provide message encryption. For more information about MAVLink message signing, see MAVLink Message Signing (Authentication).
The MAVLink message definitions (dialects) and MAVLink serialization helper functions in UAV Toolbox are obtained from mavlink/message_definitions/v1.0/ and mavlink/c_library_v2 version of repositories respectively.
The message definition XML files and the C-language version of serialization helper functions are made available under the MIT license.
Objects
mavlinktlog | Read MAVLink message from TLOG file |
mavlinkio | Create local MAVLink client |
mavlinkclient | MAVLink client information |
mavlinksub | Receive MAVLink messages |
mavlinkdialect | Parse and store MAVLink dialect XML |
Functions
mavlinksigning | Store MAVLink signing channel information (Since R2022a) |
addmavlinkkeys | Add MAVLink keys from .env file (Since R2023a) |
lsmavlinkkeys | List MAVLink keys in MATLAB session (Since R2023a) |
rmmavlinkkeys | Remove MAVLink key from MATLAB session (Since R2023a) |
Blocks
| MAVLink Blank Message | Create blank MAVLink message bus by specifying payload information and MAVLink message type |
| MAVLink Deserializer | Convert serialized uint8 MAVLink data stream to Simulink
nonvirtual bus |
| MAVLink Serializer | Serialize messages of MAVLink packet by converting Simulink nonvirtual bus to
uint8 data stream |
Featured Examples
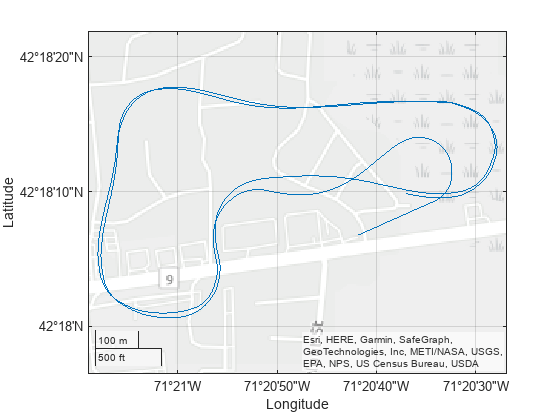
Visualize and Play Back MAVLink Flight Log
Load a telemetry log (TLOG) containing MAVLink packets into MATLAB, then extract messages for plotting

Tune UAV Parameters Using MAVLink Parameter Protocol
Use a MAVLink parameter protocol in MATLAB® and communicate with external ground control stations. A sample parameter protocol is provided for sending parameter updates from a simulated unmanned aerial vehicle (UAV) to a ground control station using MAVLink communication protocols. You set up the communication between the two MAVLink components, the UAV and the ground control station. Then, you send and receive parameter updates to tune parameter values for the UAV. Finally, if you use QGroundControl© as a ground control station, you can get these parameter updates from QGroundControl and see them reflected in the program window.

Receive Mission and Flight Parameter Data in Simulink Using MAVLink Microservices
Implement MAVLink Microservices in Simulink to receive mission and flight parameter data from QGroundControl.