Get Started with UAV Toolbox
UAV Toolbox provides tools and reference applications for designing, simulating, testing, and deploying drone, unmanned aerial vehicle (UAV), and advanced air mobility (AAM) applications. You can design flight controllers, develop autonomy algorithms, and plan UAV missions. The Flight Log Analyzer app enables you to interactively analyze 3D flight paths, telemetry information, and sensor data.
You can generate UAV scenarios for desktop simulation and for hardware-in-the-loop (HIL) testing of flight controllers and autonomy algorithms. You can simulate camera, lidar, IMU, and GPS sensor outputs in either a photorealistic 3D environment or a 2.5D simulation environment.
UAV Toolbox provides reference examples for applications such as autonomous drone package delivery using multirotor a UAV, and advanced air mobility with vertical takeoff and landing (VTOL) aircraft. The toolbox also supports C/C++ code generation for rapid prototyping, HIL testing, and standalone deployment to hardware such as the Pixhawk® Autopilot (with Embedded Coder®).
Tutorials
- Visualize and Play Back MAVLink Flight Log
Load a telemetry log (TLOG) containing MAVLink packets into MATLAB, then extract messages for plotting
- Visualize Custom Flight Log
Configure the
flightLogSignalMappingobject to visualize data from a custom flight log. - UAV Scenario Tutorial
Create a scenario to simulate unmanned aerial vehicle (UAV) flights between a set of buildings.
- Approximate High-Fidelity UAV Model with UAV Guidance Model Block
Prototype and tune a waypoint following navigation system by using a reduced-order model for UAV.
- Transition from Low- to High-Fidelity UAV Models in Three Stages
Evolve your UAV plant model continuously to stay in sync with the latest information available.
UAV Toolbox Coordinate Systems
- Coordinate Systems in UAV Toolbox
Summary of coordinate systems used in UAV Toolbox.
- Coordinate Systems for Unreal Engine Simulation in UAV Toolbox
World and vehicle coordinate systems used when simulating in the Unreal Engine® environment.
Featured Examples
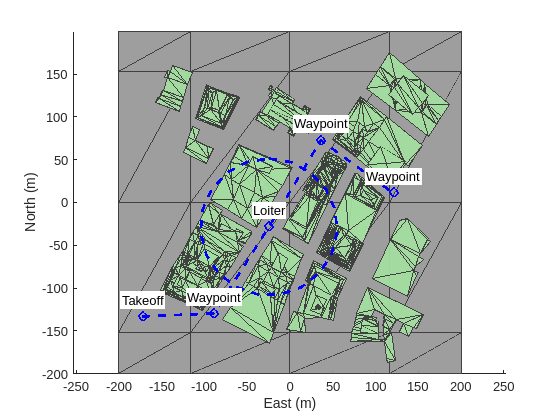
Simulate UAV Mission in Urban Environment
Simulate a UAV mission in an urban environment using UAV scenario and OpenStreetMap® data of Manhattan, New York.

Motion Planning with RRT for Fixed-Wing UAV
Plan the 3D motion of a fixed-wing UAV using the rapidly exploring random tree (RRT) algorithm, given a start and goal pose.

Simulate Simple Flight Scenario and Sensor in Unreal Engine Environment
Visualize sensors in a simulation environment that uses Unreal Engine from Epic Games.
Videos

Interactively Analyze Telemetry Data with the Flight Log Analyzer App
Learn how to analyze flight logs using the Flight Log Analyzer app.

3D Simulation for Testing UAV Applications
Learn about 3D simulation environments for testing UAV algorithms using UAV
Toolbox and Unreal Engine.