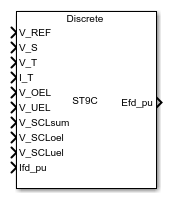
SM ST9C
Discrete- or continuous-time synchronous machine ST9C static excitation system with automatic voltage regulator
Since R2023a
Libraries:
Simscape /
Electrical /
Control /
SM Control
Description
The SM ST9C block implements a synchronous machine (SM) ST9C static excitation system model in conformance with IEEE 421.5-2016 [1].
Use this block to model the control and regulation of the field voltage of a synchronous machine.
Switch between continuous and discrete implementations of the block by using the
Sample time (-1 for inherited) parameter. To configure the
integrator for continuous time, set the Sample time (-1 for
inherited) parameter to 0. To configure the integrator
for discrete time, set the Sample time (-1 for inherited) parameter
to a positive scalar. To inherit the sample time from an upstream block, set the
Sample time (-1 for inherited) parameter to
-1.
The SM ST9C block comprises four major components:
The Current Compensator component modifies the measured terminal voltage as a function of the terminal current.
The Voltage Measurement Transducer component simulates the dynamics of a terminal voltage transducer using a low-pass filter.
The Excitation Control Elements component compares the voltage transducer output with a terminal voltage reference to produce a voltage error value. The component then passes this value through a voltage regulator to produce the field voltage.
The Power Source component models the power source for the controlled rectifier when it is independent from the terminal voltage.
This diagram shows the structure of the ST9C excitation system model:
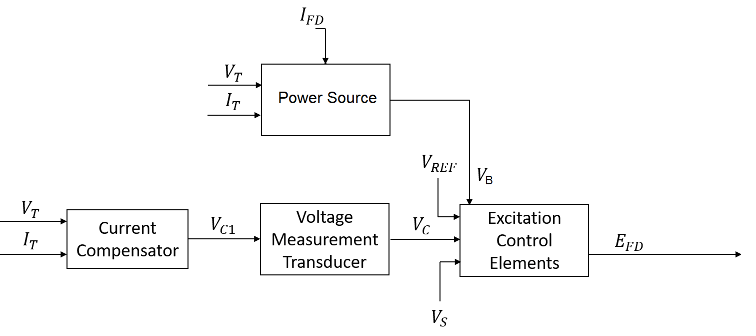
In the diagram:
VT and IT are the measured terminal voltage and current of the synchronous machine, respectively.
VC1 is the current-compensated terminal voltage.
VC is the filtered, current-compensated terminal voltage.
VREF is the reference terminal voltage.
VS is the power system stabilizer voltage.
VB is the exciter field voltage.
EFD and IFD are the field voltage and current, respectively.
Current Compensator and Voltage Measurement Transducer
The block models the current compensator by using this equation:
where:
RC is the load compensation resistance.
XC is the load compensation reactance.
The block implements the voltage measurement transducer as a Low-Pass Filter block with the time constant TR. Refer to the documentation for the Low-Pass Filter block for information about the exact discrete and continuous implementations.
Excitation Control Elements
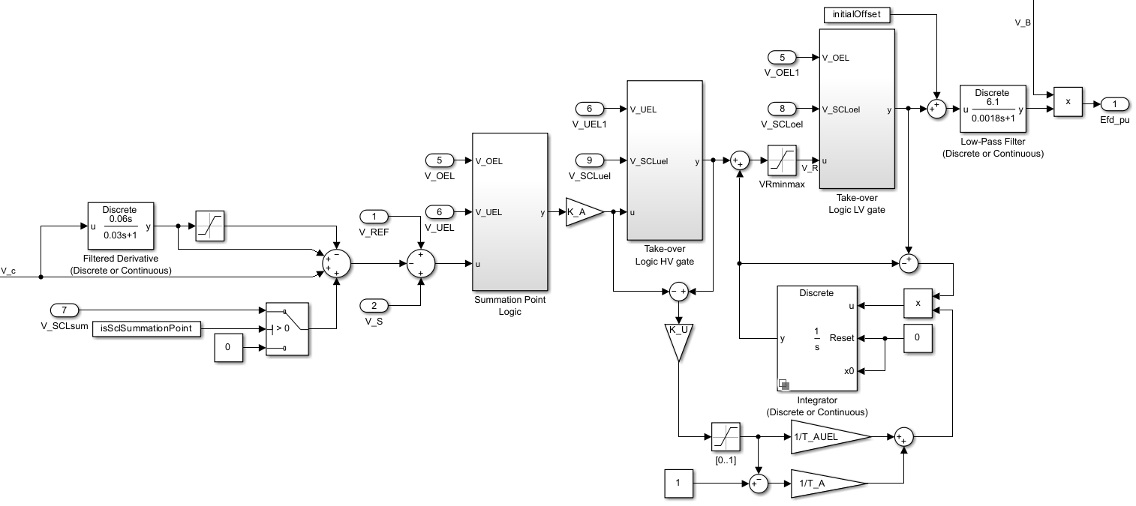
This diagram shows the structure of the excitation control elements:
In the diagram:
A differential stage in the compensated voltage Vc path provides a faster reaction of the regulator with large voltage variations. A Saturation block eliminates the influence of the differential stage for small changes in Vc, with the Upper limit and Lower limit parameters equal to Z_A, which is the value of the Dead-band for differential part influence on AVR, Z_A (1) parameter.
The Summation Point Logic subsystem models the summation point input location for the overexcitation limiter (OEL) and underexcitation limiter (UEL) voltages. For more information about using limiters with this block, see Field Current Limiters.
There are two Take-over Logic subsystems. The subsystems model the take-over point input location for the OEL, UEL and SCL. For more information about using limiters with this block, see Field Current Limiters.
A Low-Pass Filter block models the power converter stage, where Power converter gain (proportional to supply voltage), K_AS (pu) and Equivalent time constant of power converter firing control, T_AS (s) are the gain and time constant, respectively. The time constant TAS represents the total delay of the gate control unit and power converter. The gain KAS is proportional to the secondary voltage of the power potential transformer that feeds the power converter.
The UEL is a PI regulator with its own proportional gain. This PI regulator shares the integral path with the AVR. The integration time constant depends on the error signals of the UEL and AVR. The sign of the difference between the AVR error signal and the V_UELsignal that comes from the UEL model indicates whether the UEL or the AVR is active.
The Power source selector parameter controls the origin of the power source for the controlled rectifier. The subsystem multiplies the voltage regulator command signal VR by the exciter field voltage VB. For more information about the logical switch for the power source of the controlled rectifier, see Power Source.
Field Current Limiters
You can use different types of field current limiter to modify the output of the voltage regulator under unsafe operating conditions:
Use an overexcitation limiter to prevent overheating of the field winding due to excessive field current demand.
Use an underexcitation limiter to boost field excitation when it is too low, which risks desynchronization.
Use a stator current limiter to prevent overheating of the stator windings due to excessive current.
Attach the output of any of these limiters at one of these points:
Summation point — Use the limiter as part of the automatic voltage regulator (AVR) feedback loop.
Take-over points — Override the usual behavior of the AVR.
If you are using the stator current limiter at the summation point, use the input VSCLsum. If you are using the stator current limiter at the take-over point, use the overexcitation input VSCLoel, and the underexcitation input VSCLuel.
Power Source
You can use different power source representations for the controlled rectifier by
setting the Switch to select exciter supply configuration
parameter value. To derive the power source for the controlled rectifier from the
terminal voltage, set the Switch to select exciter supply
configuration parameter to Position A: power source
derived from generator terminal voltage. To specify that the power
source is independent of the terminal voltage, set the Switch to select
exciter supply configuration parameter to Position B:
power source independent of generator terminal conditions.
This diagram shows a model of the exciter power source utilizing a phasor combination of the terminal voltage VT and terminal current IT:

Ports
Input
Output
Parameters
References
[1] “IEEE Recommended Practice for Excitation System Models for Power System Stability Studies.” IEEE Std 421.5-2016 (Revision of IEEE Std 421.5-2005), August 2016, 1–207. https://doi.org/10.1109/IEEESTD.2016.7553421.
Extended Capabilities
Version History
Introduced in R2023a