simscape.multibody.Multibody Class
Namespace: simscape.multibody
Superclasses: simscape.multibody.Component
Description
Use an object of the simscape.multibody.Multibody class to construct a
multibody system. A Multibody object is a hierarchical container that can
have any type of component object, and each component object represents a part or a subsystem
of the multibody system. See simscape.multibody.Component for more information about different component
objects.
By default, a newly created Multibody object is empty. You can use the
methods of the Multibody object to construct a multibody system, prepare the
Multibody object for analyses, or create a corresponding Simulink® model. See the More About section for more information
about the Multibody class.
The simscape.multibody.Multibody class is a handle class.
Class Attributes
Sealed | true |
ConstructOnLoad | true |
HandleCompatible | true |
RestrictsSubclassing | true |
For information on class attributes, see Class Attributes.
Creation
Description
mb = simscape.multibody.Multibodysimscape.multibody.Multibody object.
Properties
Methods
Examples
More About
By default, a newly created simscape.multibody.Multibody object is empty
and has zero connectors. To construct a multibody system, use the addComponent method
to add objects to the Multibody object, then connect the objects using the
connect or connectVia method.
Each object represents a part or a subsystem of the multibody system.
To manage the complexity of a large multibody system, you can use several
Multibody objects to model the subsystems of a system. The image shows an
example of a large multibody system, Robot.
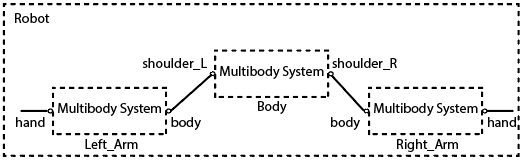
Note that you must completely construct a Multibody object before
adding it to a system. For example, in this example, you need to add the connectors
hand and body to the Left_Arm
object before adding it to the Robot object. To add the connectors, use the
addConnector
method.
To establish mechanical relationships between the three subsystems in the
Robot system, connect the Body,
Left_Arm, Right_Arm objects, as shown in the image, by
using the connect or connectVia
method.
Version History
Introduced in R2022a