maxflat
Generalized digital Butterworth filter design
Syntax
Description
[___] = maxflat(
specifies the option to display the filter design as a table, plot, or both using
n,m,Wn,designflag)designflag. You can use any of the output combinations from previous
syntaxes.
Examples
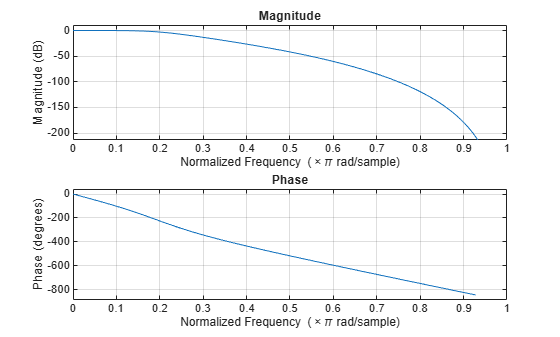
Design a generalized Butterworth filter with normalized cutoff frequency rad/s. Specify a numerator order of 10 and a denominator order of 2. Visualize the frequency response of the filter.
n = 10; m = 2; Wn = 0.2; [b,a] = maxflat(n,m,Wn); freqz(b,a)
Design a generalized Butterworth filter with normalized cutoff frequency 0.5 rad/s. Specify a numerator order of 8 and a denominator order of 2. Display the design table and the plots of the filter characteristics.
n = 8;
m = 2;
Wn = 0.5;
b = maxflat(n,m,Wn,'both'); Table:
L M N wo_min/pi wo_max/pi
8.0000 0 2.0000 0 0.2707
7.0000 1.0000 2.0000 0.2707 0.3710
6.0000 2.0000 2.0000 0.3710 0.4581
5.0000 3.0000 2.0000 0.4581 0.5419
4.0000 4.0000 2.0000 0.5419 0.6290
3.0000 5.0000 2.0000 0.6290 0.7293
2.0000 6.0000 2.0000 0.7293 1.0000

Input Arguments
Output Arguments
References
[1] Selesnick, Ivan W., and C. Sidney Burrus. “Generalized Digital Butterworth Filter Design.” IEEE® Transactions on Signal Processing 46, no. 6, (June 1998): 1688–94.
Extended Capabilities
Version History
Introduced before R2006a