Manage Array Sizes for ROS Messages in Simulink
A ROS message is represented as a bus. For more information on buses, see Composite Interface Guidelines (Simulink).
If you are working with variable-length signals in Simulink®, the nonvirtual bus used for messages cannot contain variable-length arrays as properties. All variable-length arrays are converted to fixed-length arrays for nonvirtual buses. Therefore, you must manage the maximum size for these fixed-size arrays.
Ensure that your Simulink model is configured for ROS. If it not, follow these steps:
On the Apps tab, under Control Systems, click Robot Operating System (ROS).
In the Robot Operating System (ROS) dialog box that opens up, select
Robot Operating System (ROS)from the ROS Network drop-down. This opens up the ROS tab in the toolstrip which shows the specified ROS Network in the Connect section.
Then, in the Simulation tab, select ROS Toolbox > Variable Size Message to manage array sizes. If your model uses ROS messages with variable-length arrays, the following dialog box opens. Otherwise, Simulink displays a message.
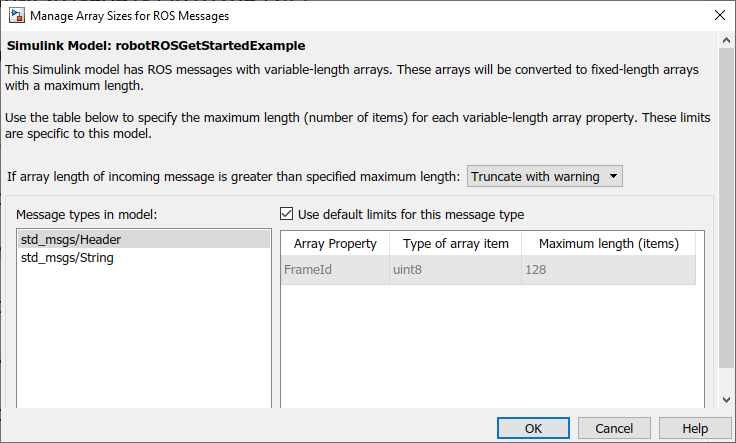
Because the message properties have a variable length, it is possible that they can be
truncated if they exceed the maximum size set for that array. You have the option of
Truncate with warning or Truncate
silently. Either way, the simulation will run, but Truncate
with warning displays a warning in the Diagnostic Viewer that the message
property has been truncated. When using generated code, the warning will be emitted using
Log Statements in
ROS. The warning will be a ROS_WARN_NAMED log statement and the
name is the model name.
The Message types in model section shows all the ROS message types that are currently used by Publish, Subscribe and Blank Message blocks in your Simulink model. You have the option to use the default limits for this message type by clicking the check box. Otherwise, select each message type individually to set the Maximum length (items) of each Array Property as desired. This maximum length is applied to all instances of that message type for that model. The maximum length is also stored with the model. Therefore, it is possible to have two models accessing the same message type with different maximum length limits.
Managing the size of your variable-length arrays can help improve performance. If you limit the size of the array to only include relevant data, you can process data more effectively. However, when running these models, consider possible issues associated with truncation and what could happen to your system if some data is ignored.
Note: If you would like to know the appropriate maximum lengths for different message types. You can simulate the model and observe the sizes output in the warning. To see an example of using ROS messages and working with variable-length arrays, see Get Started with ROS in Simulink.