robotLidarPointCloudGenerator
Description
The robotLidarPointCloudGenerator
System object™ generates detections from a statistical simulated lidar sensor. The system
object uses a statistical sensor model to simulate lidar detections with added random noise.
All detections are with respect to the coordinate frame of the vehicle-mounted sensor. You can
use the robotLidarPointCloudGenerator object in a scenario, created using a
robotSensor,
containing static meshes, robot platforms, and sensors.
To generate lidar point clouds:
Create the
robotLidarPointCloudGeneratorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Note
The robotLidarPointCloudGenerator
System object requires Computer Vision Toolbox™.
Creation
Description
lidar = robotLidarPointCloudGenerator
lidar = robotLidarPointCloudGenerator(Name=Value)robotLidarPointCloudGenerator(UpdateRate=100,HasNoise=false) creates
a lidar point cloud generator that reports detections at an update rate of 100 Hz without
noise.
Properties
Usage
Description
[
additionally returns ptCloud,isValidTime] = lidar(tgts,simTime)isValidTime which specifies if the specified
simTime is a multiple of the sensor's update interval
(1/UpdateRate).
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
This example shows how to use a statistical lidar sensor model to generate point clouds from a mesh.
Create Sensor Model
Create a statistical sensor model, lidar, using the robotLidarPointCloudGenerator System object.
lidar = robotLidarPointCloudGenerator(HasOrganizedOutput=false);
Create Floor
Use the extendedObjectMesh object to create mesh for the target object. Define the position and orientation of the target object with respect to the sensor frame.
target = struct("Mesh",scale(extendedObjectMesh("cuboid"),[100 100 2]), ... "Position",[0 0 -10], ... "Orientation",quaternion([1 0 0 0]));
Generate Point Clouds from Floor
ptCloud = lidar(target,0);
Visualize
Use the translate function to translate the object mesh to its specified location and use the show function to visualize it. Use the scatter3 function to plot the point clouds stored in ptCloud.
show(translate(target.Mesh,target.Position));
hold on
scatter3(ptCloud.Location(:,1),ptCloud.Location(:,2),ptCloud.Location(:,3))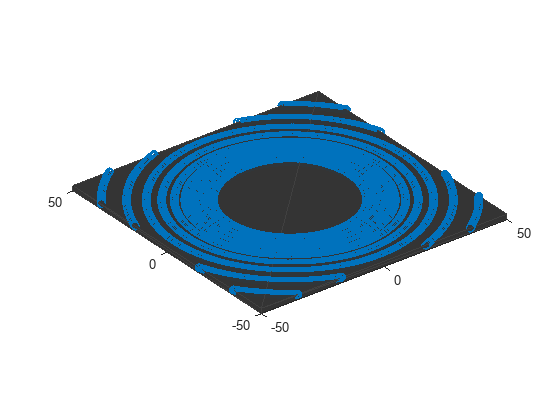
Version History
Introduced in R2022a
See Also
robotPlatform | robotScenario | robotSensor | extendedObjectMesh