homeConfiguration
Get home configuration of robot
Description
configuration = homeConfiguration(robot)HomePosition properties of each nonfixed
joint.
Examples
Show different configurations of a robot created using a rigidBodyTree model. Use the homeConfiguration or randomConfiguration functions to generate the structure that defines all the joint positions.
Load a FANUC LR Mate 200ib from the Robotics System Toolbox™ loadrobot. It is returned as a rigidBodyTree object.
robot = loadrobot("fanucLRMate200ib");
showdetails(robot)-------------------- Robot: (9 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 base base_link-base fixed base_link(0) 2 link_1 joint_1 revolute base_link(0) link_2(3) 3 link_2 joint_2 revolute link_1(2) link_3(4) 4 link_3 joint_3 revolute link_2(3) link_4(5) 5 link_4 joint_4 revolute link_3(4) link_5(6) 6 link_5 joint_5 revolute link_4(5) link_6(7) 7 link_6 joint_6 revolute link_5(6) flange(8) tool0(9) 8 flange joint_6-flange fixed link_6(7) 9 tool0 link_6-tool0 fixed link_6(7) --------------------
Create a structure for the home configuration of the robot. The structure has joint names and positions for each body on the robot model.
config = homeConfiguration(robot)
config=1×6 struct array with fields:
JointName
JointPosition
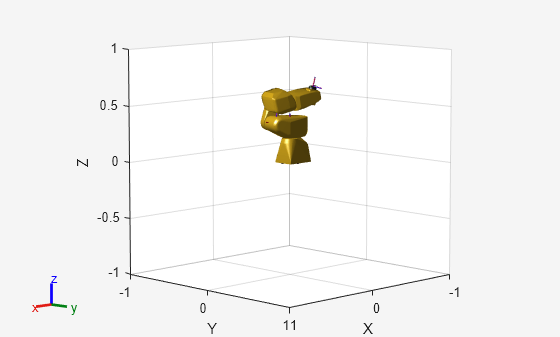
Show the home configuration using show. You do not need to specify a configuration input.
show(robot);
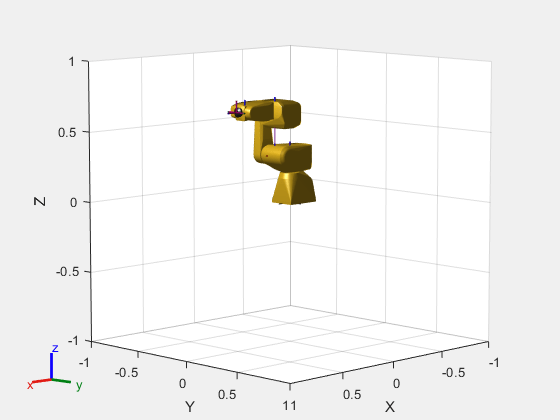
Modify the configuration and set the second joint position to pi/2. Show the resulting change in the robot configuration.
config(2).JointPosition = pi/2; show(robot,config);
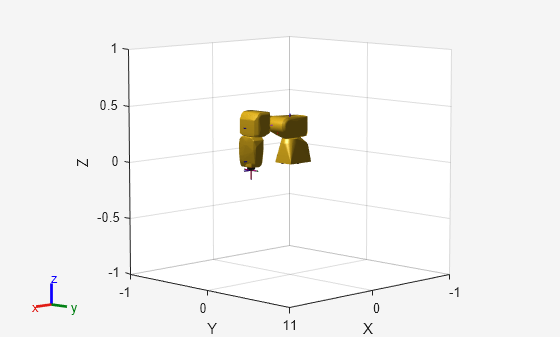
Create random configurations and show them.
show(robot,randomConfiguration(robot));