Robot Simulation
Cuboid simulation, co-simulation, example templates
Author robot scenarios and incorporate sensor models to test autonomous robot algorithms in simulated environments. Validate your robot models in virtual simulation environments by co-simulating with Gazebo, Unreal Engine®, and Simulink® 3D Animation™.
Categories
- Cuboid Scenario Simulation
Scenarios with static meshes, robot platforms, sensors
- High-Fidelity Simulation
Author scenes with realistic graphics, generate high-fidelity sensor data
- Gazebo Co-Simulation
High fidelity simulation using co-simulation
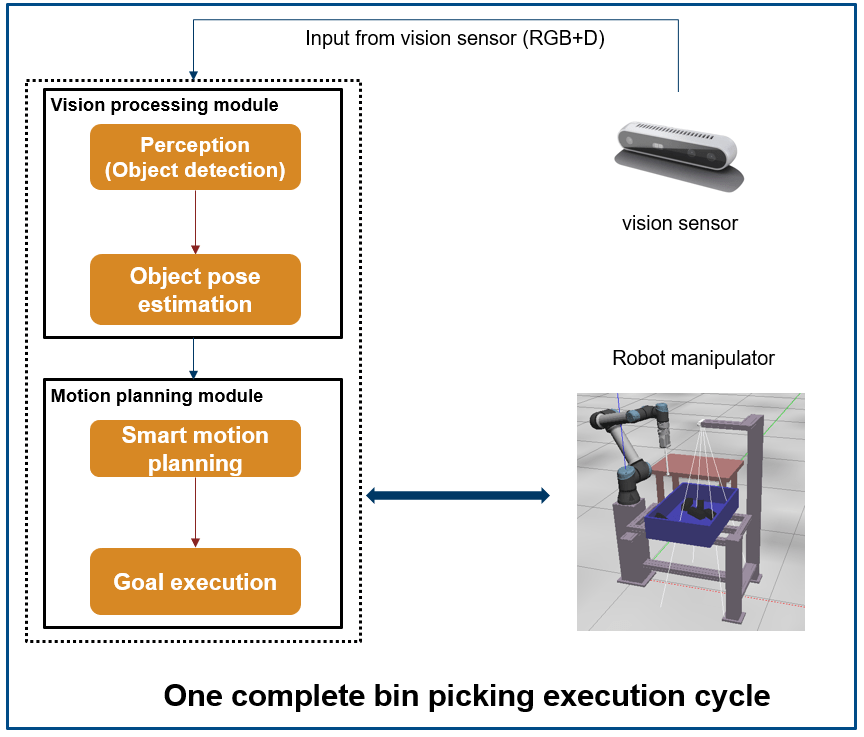
- Bin-Picking Simulation
Manipulator pick-and-place and bin-picking simulations
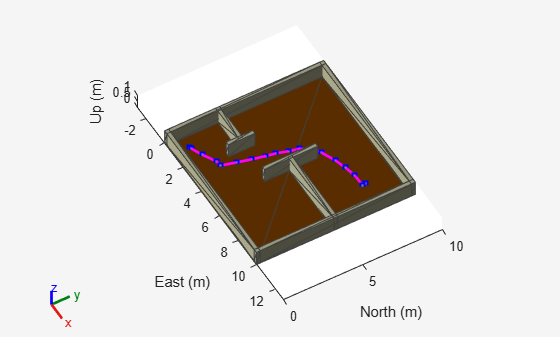
- Warehouse Robot Simulation
Multi-robot management, obstacle avoidance, inventory management
Featured Examples


You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)