Radar Designer
Model radar gains and losses and assess performance in different environments
Description
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of conventional air and ground-based radar systems at the early stage of radar development. Using the app, you can:
Assess and compare multiple radar designs in a single session
Add smart radar, environment, and target Radar Designer Configurations to jump-start your analysis
Incorporate environmental effects due to Earth's curvature, atmosphere, terrain, and precipitation
Add custom target radar cross-sections, antenna/array models, and both range-independent and range-dependent losses
Export and save results, sessions, models, and plots to continue your analysis
Export a MATLAB® script to simulate the radar detecting a target in a dynamic scenario (since R2024b)
Open the Radar Designer App
MATLAB Toolstrip: On the Apps tab, under Radar and Tracking, click the app icon.
MATLAB command prompt: Enter
radarDesigner.
Examples
Design a radar to install on top of a truck. Adjust the design parameters so the radar can work in foggy conditions and still make the objective range. Export the design session to the MATLAB Workspace.
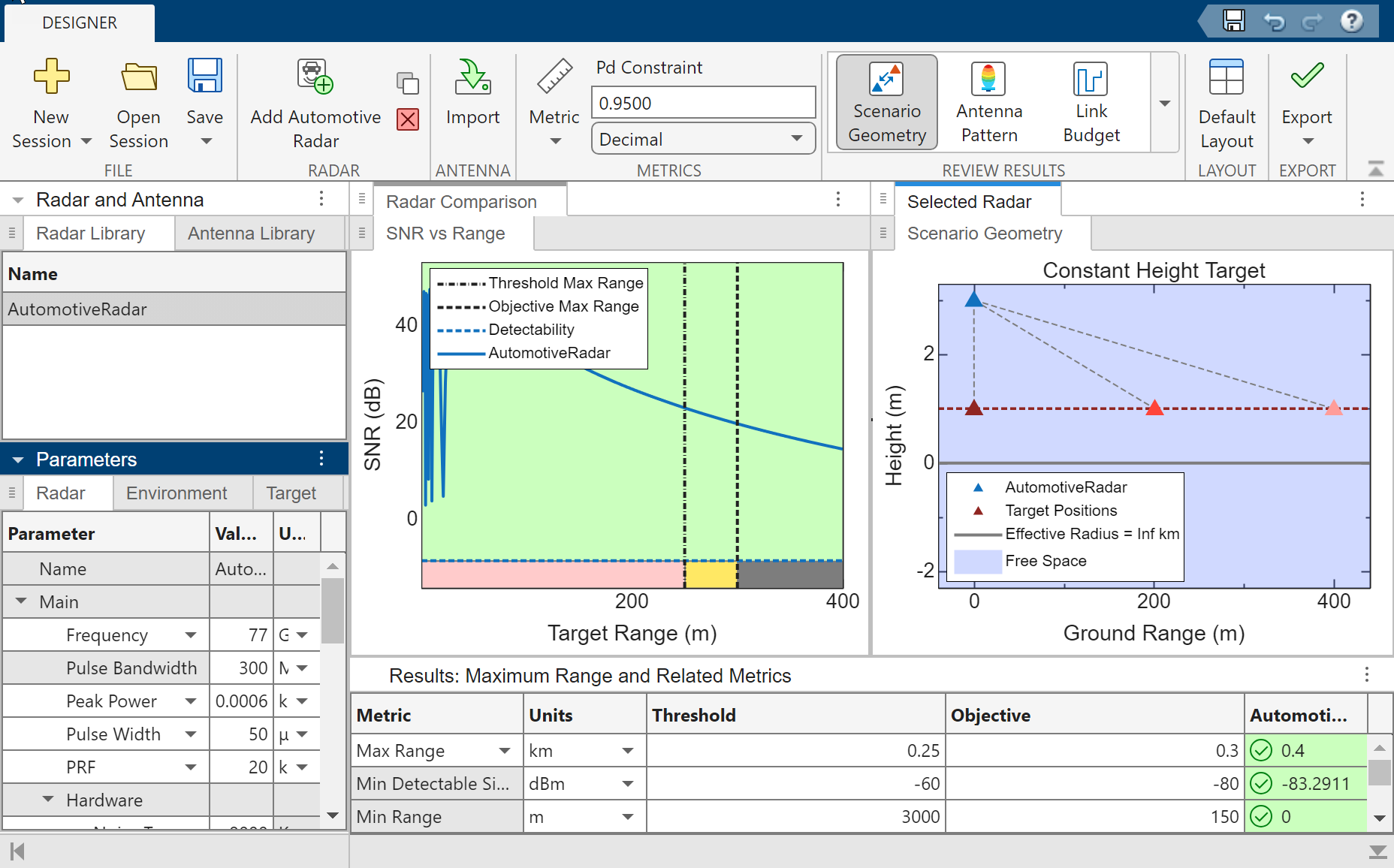
Open Radar Designer. At the command line, type
radarDesigner
Automotive Radar option. The app specifies typical
automotive radar design, target, and environment parameters.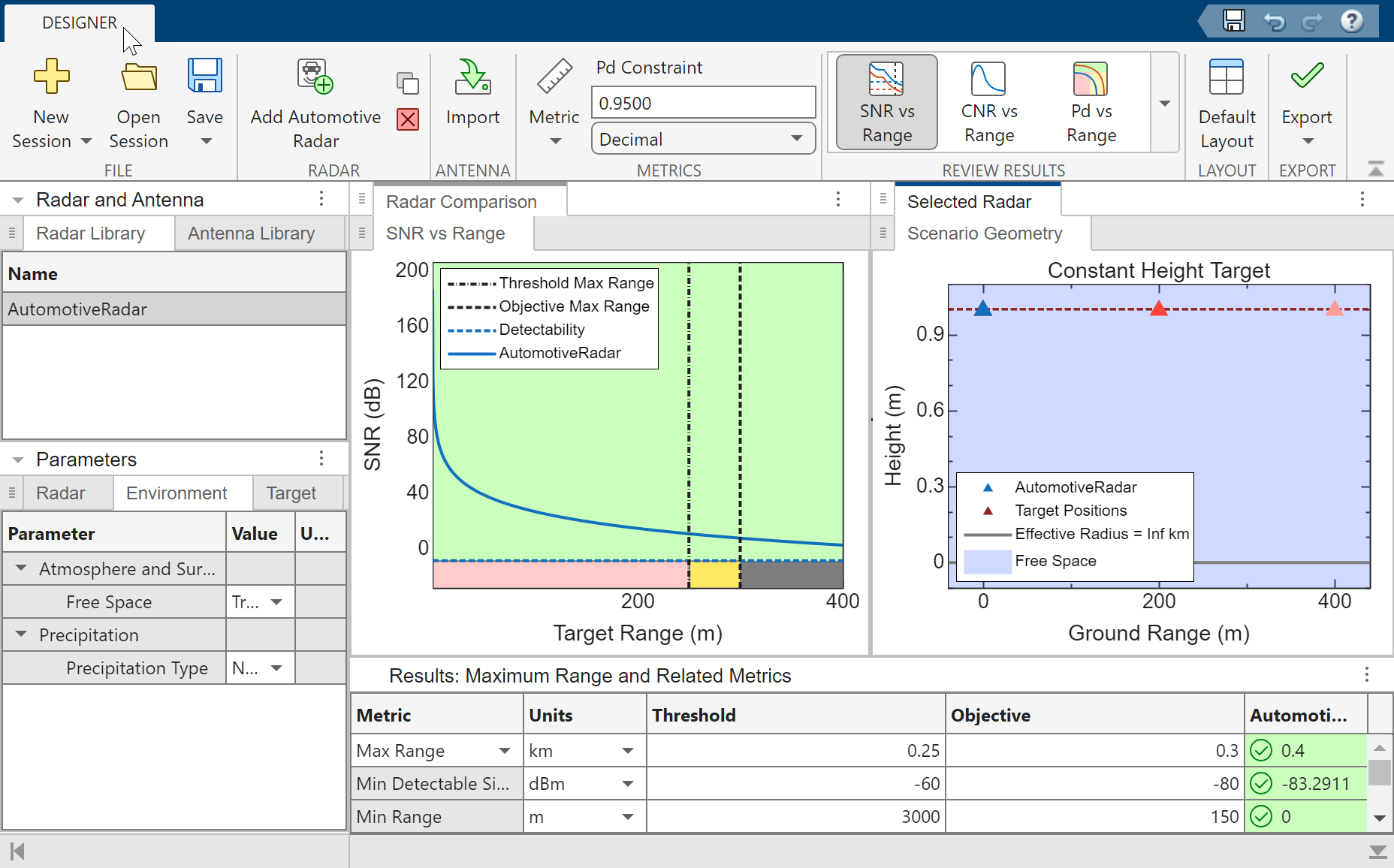
The radar you are designing must be set 3 meters above the ground. On the
Radar tab, in the Antenna and Scanning
section, change the Antenna Height from 1 meter to 3 meters.
On the Environment tab, in the
Precipitation section, specify the Precipitation
Type as Fog and set the Fog
Density to Heavy.
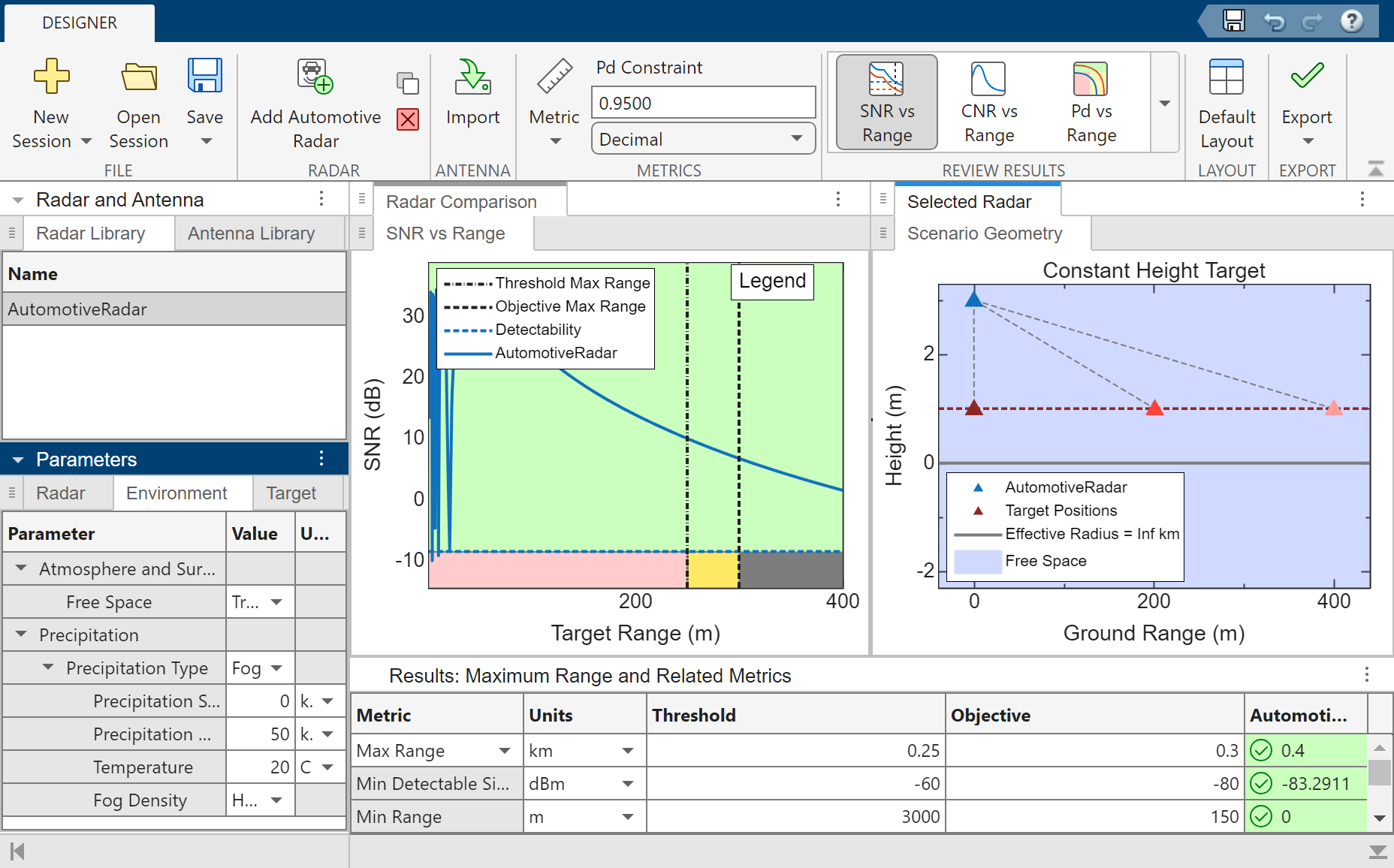
As the SNR vs Range plot and Metrics and
Requirements table show, the radar satisfies the threshold maximum range
but falls short of the desired maximum range of 300 meters.
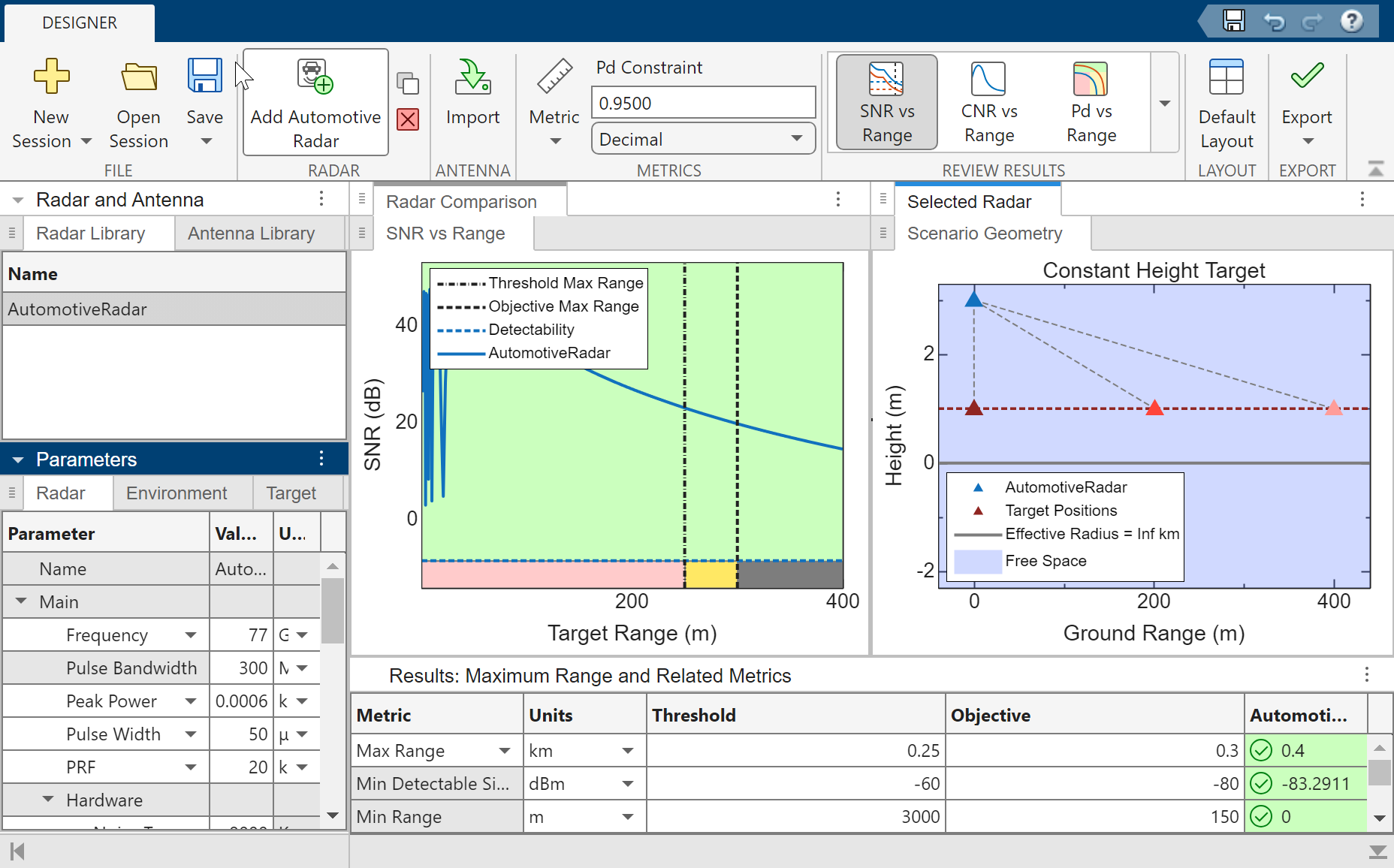
Increase the transmitted power to attain a higher maximum range. On the
Radar tab, in the Main section, increase the
Peak Power to 6e-04
kW. The plot and table show that the radar satisfies the
requirement with the new power value.
Export the radar design to the MATLAB Workspace. On the toolstrip, click Export and select
Generate Metrics Report to generate a formatted report of
numeric metrics.
Related Examples
Parameters
Radar and Antenna
Select the current radar from the Radar Library tab of the Radar and Antenna table. To populate this table, click New Session on the app toolstrip to load one of the built-in Radar Designer Configurations. Use the Add Radar toolstrip button to add additional radars. Select the current radar from the Name list or rename a radar design. Switch between the listed radars to quickly assess and compare design viability.
Since R2025a
Use the Import Antenna toolstrip button to import antennas
into the Antenna Library tab of the Radar and
Antenna table. A default antenna, DefaultSinc, is
automatically listed. Nonpolarized Phased Array System Toolbox™ antenna objects are supported. Antennas from the antenna library can be
selected in the Antenna and Scanning menu of the
Radar parameter tab.
Radar, Target, and Environment
Use the Radar section of the app toolstrip to change
Use these parameters to specify pulse and carrier settings, such as the carrier frequency and the transmitted power.
| Parameter | Description |
|---|---|
Frequency (default) or
Wavelength | Carrier frequency or carrier wavelength, specified as a scalar.
|
| Pulse Bandwidth | Bandwidth of the transmitted pulse, specified as a scalar in
Hz, kHz,
MHz, or
GHz. |
Peak Power (default) or
Average Power | Average transmitted power or peak transmitted power, specified as a scalar.
|
Pulse Width (default) or
Duty Cycle | Radar pulse width or radar duty cycle, specified as a scalar.
|
PRF (default) or
PRI | Pulse repetition frequency (PRF) or pulse repetition interval (PRI), specified as a scalar.
|
Use these parameters to specify noise settings, such as noise temperature or dynamic range.
| Parameter | Description |
|---|---|
System Noise Input drop down menu
Noise Figure or Noise
Temperature | System noise figure or noise temperature, specified as a scalar.
|
| Reference Noise Temperature | Reference noise temperature, specified as a scalar in K. This parameter applies only if |
| Quantization Noise | Select Ignored (default) to ignore
quantization noise or Included to
include quantization noise. |
| Number of Bits | Number of bits in the analog-to-digital (A/D) converter, specified as a dimensionless scalar. This parameter applies only if Quantization Noise is included. |
| Dynamic Range | Dynamic range of the A/D converter, specified as a
scalar in This parameter applies only if Quantization Noise is included. |
Use these parameters to specify antenna pattern, position, beamwidth, and gain settings, such as antenna height, antenna polarization, or azimuth beamwidth.
| Parameter | Description |
|---|---|
| Antenna Height | Height of the antenna above the surface, specified as a
scalar in This parameter applies to both the transmit antenna and the receive antenna. |
| Antenna Tilt Angle | Angle between the electric axis of the antenna and the ground
plane, specified as a scalar in This parameter applies to both the transmit antenna and the receive antenna. |
| Antenna Polarization | Specify the antenna polarization as
This parameter applies to both the transmit antenna and the receive antenna. |
Specify the Transmit Antenna as Sinc
Antenna Pattern or select an Antenna
Library antenna:
Sinc Antenna Pattern— Uses a sinc antenna pattern. Specify the Gain manually or automatically calculate the Gain by specifying the Azimuth Beamwidth, and Elevation Beamwidth, assuming an ideal Gaussian beam pattern. Note that the automatically calculated Gaussian gain is different from the gain that is automatically populated for theDefaultSincAntenna Library antenna, which does not assume a Gaussian beam pattern.Parameter Description Sinc Gain Input Select either Manual GainorFrom BeamwidthManual Gain— Use the Gain box to enter a custom value for the transmit antenna in dBi.From Beamwidth— Compute the transmit antenna gain from the beamwidths assuming an ideal Gaussian beam pattern with no sidelobes. The resulting gain is displayed in the Gain box.
Azimuth Beamwidth Azimuth beamwidth of the transmit antenna, specified as a scalar in deg,rad, ormrad. This parameter applies only ifFrom Beamwidthis selected under Sinc Gain Input.Elevation Beamwidth Elevation beamwidth of the transmit antenna, specified as a scalar in deg,rad, ormrad. This parameter applies only ifFrom Beamwidthis selected under Sinc Gain Input.Antenna Library— Select an antenna from the Antenna Library. The name of the selected antenna is displayed in the Imported Antenna Object box. The Azimuth Beamwidth, Elevation Beamwidth, and Gain for the transmit antenna pattern are automatically populated.
Select Use Different Antenna for Receive to
indicate that the receive and transmit antennas have different gains or
select a distinct antenna pattern from the Antenna
Library. If you select True to use a
different antenna for receive, you can specify the Receive
Antenna as Sinc Antenna Pattern or
select an Antenna Library antenna:
Sinc Antenna Pattern— Uses a sinc antenna pattern. Specify the Gain manually or automatically calculate the Gain by specifying the Azimuth Beamwidth, and Elevation Beamwidth, assuming an ideal Gaussian beam pattern. Note that the automatically calculated Gaussian gain is different from the gain that is automatically populated for theDefaultSincAntenna Library antenna, which does not assume a Gaussian beam pattern.Parameter Description Sinc Gain Input Select either Manual GainorFrom BeamwidthManual Gain— Use the Gain box to enter a custom value for the receive antenna in dBi.From Beamwidth— Compute the receive antenna gain from the beamwidths assuming an ideal Gaussian beam pattern with no sidelobes. The resulting gain is displayed in the Gain box.
Azimuth Beamwidth Azimuth beamwidth of the transmit antenna, specified as a scalar in deg,rad, ormrad. This parameter applies only ifFrom Beamwidthis selected under Sinc Gain Input.Elevation Beamwidth Elevation beamwidth of the transmit antenna, specified as a scalar in deg,rad, ormrad. This parameter applies only ifFrom Beamwidthis selected under Sinc Gain Input.Antenna Library— Select an antenna from the Antenna Library. The name of the selected antenna is displayed in the Imported Antenna Object box. The Azimuth Beamwidth, Elevation Beamwidth, and Gain for the receive antenna pattern are automatically populated.
Specify the scan mode for your design as one of these:
None— The radar performs no scanning. Radar Designer does not incorporate scanning-related losses into the analysis.Mechanical— The radar performs mechanical scanning. Radar Designer incorporates beam shape loss and beam-dwell factor (range-dependent loss for rapidly scanning beam) into the analysis.Electronic— The radar uses a phased array to perform electronic scanning. Radar Designer incorporates beam shape loss and scan sector loss into the analysis.
If you specify Scan Mode as
Mechanical or
Electronic, you can set these
parameters.
| Parameter | Description |
|---|---|
| Azimuth Scan Sector Size | Azimuth span of the search volume, specified as a scalar in
deg, rad,
or mrad. |
| Initial Elevation of the Scan Volume | Initial elevation of the scan volume, specified as a scalars
in deg, rad,
or mrad. |
| Final Elevation of the Scan Volume | Final elevation of the scan volume, specified as a scalars in
deg, rad,
or mrad. |
Based on the chosen parameters, Radar Designer computes and displays these settings:
Max Scan Rate, the maximum scan rate in degrees per second given the selected PRF, the number of transmitted pulses, and the antenna beamwidth. This setting is displayed if Scan Mode is specified as
Mechanical.Search Volume Size, the size of the solid angular search volume in steradians.
Search Time, the time in seconds it takes to scan the search volume given the selected PRF, the number of transmitted pulses, and the antenna beamwidth.
Use these parameters to specify Pfa, CPI, and M-of-N settings, such as probability of false alarm or track confirmation logic threshold.
| Parameter | Description |
|---|---|
| Probability of False Alarm | Desired probability of false alarm
(Pfa) at the output of the
detector, specified as a dimensionless scalar. The default value is
10–6
( |
| Pulse Integration | Pulse integration, specified as
|
Select Noncoherent or
Coherent pulse integration. Select
Noncoherent pulse integration to enable
Moving Target Indicator (MTI) and Binary
Pulse Integration tabs.
Set Moving Target Indicator (MTI) to
true to include moving target indicator
processing in your design. If you enable moving target indicator processing,
you can set these parameters.
| Parameter | Description |
|---|---|
| Canceler | Canceler, specified as one of these:
|
| Null Velocity | Clutter velocity to which the MTI filter is adjusted,
specified as a scalar in m/s,
km/hr,
mi/hr, or
kts. |
| Method | Method to perform MTI processing, specified as one of these:
|
| Quadrature Processing | Select Quadrature Processing to enable quadrature-channel (vector) MTI processing for your design. If this parameter is not selected, Radar Designer performs single-channel MTI processing. |
This option is available if Pulse
Integration is set to
Noncoherent.
Specify how to perform binary (M-of-N) pulse integration as one of these:
None— Radar Designer does not apply binary integration.Automatic— Radar Designer applies binary integration and computes the optimal number of detected pulses (M) out of the total number of pulses (N).Custom— Radar Designer applies binary integration with a manually specified number of detected pulses. If you choose this option, specify the Number of Detected Pulses (M) out of the total number of pulses (N) as a positive integer.
This option is available if Pulse
Integration is set to
Noncoherent.
Set Constant False Alarm Rate (CFAR) to
Specified to enable constant false alarm rate
(CFAR) detection. If you enable CFAR detection, you can set these
parameters.
| Parameter | Description |
|---|---|
| Number of Reference Cells | Total number of CFAR reference (training) cells, specified as a positive integer scalar. |
| Method | CFAR detection method, specified as one of these:
|
Specify the number of processing intervals as a positive integer scalar.
Set M-of-N Processing Interval Integration to
On to enable
M-of-N integration of processing
intervals. If you enable M-of-N
integration, you can set this parameter.
| Parameter | Description |
|---|---|
| Number of CPIs with Detection | Number of coherent processing intervals with a declared detection (M) out of the total number of CPIs (N), specified as a dimensionless scalar. |
Select Sensitivity Time Control to enable sensitivity time control in your design. If you enable sensitivity time control, you can set these parameters.
| Parameter | Description |
|---|---|
| Cutoff Range | Cutoff range beyond which the full receiver gain is used,
specified as a scalar in m,
km, nmi,
ft, or
kft. Default: 50 km. |
| Exponent | Exponent selected to maintain target detectability for ranges inside the cutoff range. Default: 3.5. |
Use the Common Gate History Algorithm to compute track confirmation probabilities. You can set these parameters.
| Parameter | Description |
|---|---|
| Confirmation Threshold | Confirmation threshold, specified as two positive integer scalars that represent an M-of-N or M/N confirmation logic. Default: 2/3. |
Update Rate or Update
Time | Update rate or update time:
Default: 1 Hz or 1 s. |
Use these parameters to specify loss factors.
| Parameter | Description |
|---|---|
| Eclipsing | Eclipsing loss, specified as None
(default), Range-Dependent Factor, or
Statistical Loss. |
| Custom Loss | Custom loss, specified as a scalar in dB
or linear units. Default: 4 dB. |
To enable the Target parameters, add at least one radar to the app.
| Parameter | Description |
|---|---|
| Radar Cross Section | Radar cross section, specified as a scalar in
m2 or
dBsm. |
| Swerling Model | Swerling model, specified as Swerling 0/5,
Swerling 1, Swerling
2, Swerling 3, or
Swerling 4. |
Height or Elevation
Angle | Height or elevation angle, specified as a scalar.
|
| Max Acceleration | Maximum acceleration, specified as a scalar in
m2 or in units of
g. |
Use the Environment tab to incorporate effects due to earth's curvature, atmosphere, terrain, and precipitation.
Specify atmosphere and surface characteristics to use seasonal latitude models, surface, and surface clutter settings.
By default. Radar Designer has the Free Space
parameter selected. This option corresponds to propagation in a vacuum, and the
only variable you can control is the Precipitation. To access other options, clear the box.
Specify the Earth Model as
Curved or Flat. Using a
curved Earth model gives access to more atmosphere models and enables you to
control the Effective Earth
Radius.
Specify the type of atmosphere through which the radar signal propagates as
No Atmosphere, Uniform,
Standard, Low Latitude,
Mid Latitude, or High
Latitude.
Specify No Atmosphere to use a constant index
of refraction of 1. This model does not incorporate atmospheric gas loss or
lens effect loss.
Specify Uniform for an atmosphere with
uniform temperature, pressure, and water vapor density. This model can
incorporate atmospheric gas loss but not lens effect loss. You can set these
parameters.
| Parameter | Description |
|---|---|
| Ambient Temperature | Temperature of uniform atmosphere, specified as a scalar in
C or K.
Default: 15 °C. |
| Dry Air Pressure | Dry air pressure of uniform atmosphere, specified as a scalar
in hPa, Pa,
or mbar. Default: 1013 hPa. |
| Water Vapor Density | Water vapor density of uniform atmosphere, specified as a
scalar in
g/m3 or
g/cm3.
Default: 7.5 g/m3. |
| Include Atmospheric Gases Loss | Select to incorporate the path loss due to atmosphere gaseous absorption. |
Specify Standard to use the ITU Mean Annual Global
Reference Atmosphere (MAGRA) recommended in ITU-R P.835-6 [1]. This
option applies only if Earth Model is specified as
Curved. You can set these
parameters.
| Parameter | Description |
|---|---|
| Water Vapor Density Profile | Water vapor density profile, specified as
Automatic or
Custom. Use this parameter to use the
settings recommended in ITU-R P.835-6 or to use your own settings
of water vapor density and scale height. |
| Surface Water Vapor Density | Surface water vapor density, specified as a scalar in
This
parameter applies only if Water Vapor Density
Profile is specified as
|
| Scale Height | Scale height, specified as a scalar in
This parameter
applies only if Water Vapor Density Profile
is specified as |
| Include Atmospheric Gases Loss | Select to incorporate the path loss due to atmosphere gaseous absorption. |
| Include Lens Effect Loss | Select to incorporate the lens effect loss due to the changing index of refraction in the atmosphere. This effect is significant only at small grazing angles. |
Specify Low Latitude to use the ITU atmosphere
model for latitudes less than 22° recommended in ITU-R P.835-6 [1]. This
option applies only if Earth Model is specified as
Curved. You can set these
parameters.
| Parameter | Description |
|---|---|
| Include Atmospheric Gases Loss | Select to incorporate the path loss due to atmosphere gaseous absorption. |
| Include Lens Effect Loss | Select to incorporate the lens effect loss due to the changing index of refraction in the atmosphere. This effect is significant only at small grazing angles. |
Specify Mid Latitude to use the ITU atmosphere
model for latitudes from 22° to 45° recommended in ITU-R P.835-6 [1]. This
option applies only if Earth Model is specified as
Curved. You can set these
parameters.
| Parameter | Description |
|---|---|
| Season | Season, specified as Summer or
Winter. |
| Include Atmospheric Gases Loss | Select to incorporate the path loss due to atmosphere gaseous absorption. |
| Include Lens Effect Loss | Select to incorporate the lens effect loss due to the changing index of refraction in the atmosphere. This effect is significant only at small grazing angles. |
Specify High Latitude to use the ITU atmosphere
model for latitudes greater than 45° recommended in ITU-R P.835-6 [1]. This
option applies only if Earth Model is specified as
Curved. You can set these
parameters.
| Parameter | Description |
|---|---|
| Season | Season, specified as Summer or
Winter. |
| Include Atmospheric Gases Loss | Select to incorporate the path loss due to atmosphere gaseous absorption. |
| Include Lens Effect Loss | Select to incorporate the lens effect loss due to the changing index of refraction in the atmosphere. This effect is significant only at small grazing angles. |
Specify Effective Earth Radius as one of these:
Automatic— Radar Designer computes the radius automatically based on the reference atmosphere.Atmosphere Model Effective Earth Radius No Atmosphere6371 km Uniform6371 km Standard8719 km Low Latitude9540 km Mid Latitude8262 km High Latitude8308 km Custom— This option is recommended for high-altitude geometries. Specify the effective radius of the Earth as a scalar inm,km,nmi,ft, orkft. This parameter is often set to 4/3 of the Earth's actual radius.
Specify the type of surface on which the radar signal propagates as
Featureless, Sea,
Land, or Custom.
If you specify the Surface Type as
Featureless, you can set the
Propagation Factor parameter, which is available only
if you set Earth Model to
Curved. Propagation Factor
is off by default.
If you specify the Surface Type as
Sea, you can set these
parameters.
| Parameter | Description |
|---|---|
| Sea State Number | Sea state number, specified as one of these:
|
| Include Radar Propagation Factor | The radar propagation factor is the ratio of the magnitude of the actual magnetic field at a point in space to the magnitude of the magnetic field at the same point in free space. This parameter is available only if you set
Earth Model to
|
| Permittivity Model | Permittivity model, specified as one of these:
This parameter applies only if Include Radar Propagation Factor is selected. |
If you specify the Surface Type as
Land, you can set these
parameters.
| Land Type | Land type, specified as one of these:
|
| Include Radar Propagation Factor | The radar propagation factor is the ratio of the magnitude of the actual magnetic field at a point in space to the magnitude of the magnetic field at the same point in free space. This parameter is available only if you set
Earth Model to
|
| Vegetation Type | Vegetation type, specified as one of these:
This parameter applies only if Include Radar Propagation Factor is selected. |
| Permittivity Model | Permittivity model, specified as one of these:
This parameter applies only if Include Radar Propagation Factor is selected. |
If you specify the Surface Type as
Custom, you can set these
parameters.
| Parameter | Description |
|---|---|
| Height Standard Deviation | Surface height standard deviation, specified as a scalar in
m, km,
nmi, ft,
or kft. |
| Include Radar Propagation Factor | The radar propagation factor is the ratio of the magnitude of the actual magnetic field at a point in space to the magnitude of the magnetic field at the same point in free space. This parameter is available only if you set
Earth Model to
|
| Slope | Surface slope, specified as a scalar in
This parameter applies only if Include Radar Propagation Factor is selected. |
| Permittivity | Surface permittivity, specified as a complex-valued scalar in F/m. Default: (28.5 – j11.5) F/m. |
The properties of the Custom
Surface Type have no dependence on frequency.
You can specify these clutter properties.
| Parameter | Description |
|---|---|
| Gamma | Surface gamma (γ) parameter, specified as
a scalar in The γ value for a system operating at a frequency f is γ = γ0 + 5 log10(f/f0), where γ0 is the value of γ at f0 = 10 GHz and is determined by measurement. This parameter applies only if
Surface Type is specified as
|
| Clutter Velocity Specification | Clutter velocity, specified as one of these:
This parameter applies only if Surface
Type is specified as
|
| Polarization Dependence | Polarization dependence, specified as
This parameter
applies only if Surface Type is specified as
|
| Clutter Velocity | Clutter velocity, specified as a scalar in
This parameter applies
only if Polarization Dependence is specified as
|
| H-pol Clutter Velocity | Clutter velocity for horizontal polarization, specified as a
scalar in This parameter applies
only if Polarization Dependence is specified as
|
| V-pol Clutter Velocity | Clutter velocity for vertical polarization, specified as a
scalar in This parameter applies
only if Polarization Dependence is specified as
|
| Clutter Velocity Standard Deviation | Clutter velocity standard deviation (clutter velocity spread),
specified as a scalar in m/s,
km/hr, mi/hr, or
kts. |
Specify the Precipitation Type during the propagation of
the radar signal as None,
Rain, Snow,
Fog, or Clouds to use
rain, snow, fog, and cloud models with range settings.
If you specify the Precipitation Type as
Rain, you can set these
parameters.
| Parameter | Description |
|---|---|
| Model | Rain model, specified as one of these:
|
| Precipitation Start Range | Start range of the precipitation patch, specified as a scalar
in m, km,
nmi, ft,
or kft. |
| Precipitation Range Extent | Range extent of the precipitation patch, specified as a
positive scalar in m,
km, nmi,
ft, or
kft. |
| Rain Rate | Long-term statistical rain rate, specified as a scalar in mm/hr. |
| Statistical Percentage | Statistical Percentage, specified as a dimensionless scalar
no smaller than 0.001 and no larger than 1. This parameter returns
the attenuation for the specified percentage of time and applies
only if Model is specified as
ITU. |
If you specify the Precipitation Type as
Snow, you can set these
parameters.
| Parameter | Description |
|---|---|
| Precipitation Start Range | Start range of the precipitation patch, specified as a scalar
in m, km,
nmi, ft,
or kft. |
| Precipitation Range Extent | Range extent of the precipitation patch, specified as a
positive scalar in m,
km, nmi,
ft, or
kft. |
| Snow Rate | Snow rate, specified as:
|
| Liquid Water Content | Liquid water content, specified as a scalar in mm/hr. This
parameter applies only if Snow Rate is
specified as Custom. A moderate snow
rate is from 1 mm/hr to 2.5 mm/hr. |
Radar Designer uses the Gunn-East model [3] to compute snow loss.
If you specify the Precipitation Type as
Fog, you can set these
parameters.
| Parameter | Description |
|---|---|
| Precipitation Start Range | Start range of the precipitation patch, specified as a scalar
in m, km,
nmi, ft,
or kft. |
| Precipitation Range Extent | Range extent of the precipitation patch, specified as a
positive scalar in m,
km, nmi,
ft, or
kft. |
| Temperature | Fog ambient temperature, specified as a scalar in
C or
K. |
| Fog Density | Fog liquid water density, specified one of these:
|
| Liquid Water Density | Liquid water density, specified as a scalar in
g/m3 or
g/cm3.
This parameter applies only if Fog Density is
specified as Custom. |
Radar Designer uses the ITU fog/cloud model from ITU-R P.840-6. The model is not recommended for slant path propagation.
If you specify the Precipitation Type as
Clouds, you can set these
parameters.
| Parameter | Description |
|---|---|
| Precipitation Start Range | Start range of the precipitation patch, specified as a scalar
in m, km,
nmi, ft,
or kft. |
| Precipitation Range Extent | Range extent of the precipitation patch, specified as a
positive scalar in m,
km, nmi,
ft, or
kft. |
| Cloud Type | Type of clouds, specified as one of these:
|
| Liquid Water Density | Liquid water density, specified as a scalar in
g/m3 or
g/cm3.
This parameter applies only if Fog Density is
specified as Custom. |
Radar Designer uses the ITU fog/cloud model from ITU-R P.840-6. The model is not recommended for slant path propagation.
Performance Metrics
Specify the quantity for which to solve the radar equation and the quantity to keep fixed when solving.
Probability of Detection
 — Compute probability of detection
(Pd) and other metrics with a maximum
range constraint. Specify the maximum range as a scalar in
— Compute probability of detection
(Pd) and other metrics with a maximum
range constraint. Specify the maximum range as a scalar in
m,km,nmi,ft, orkft.Maximum Range
 — Compute maximum range and other metrics with a
probability-of-detection (Pd)
constraint. Specify the probability of detection as a scalar in decimal
units.
— Compute maximum range and other metrics with a
probability-of-detection (Pd)
constraint. Specify the probability of detection as a scalar in decimal
units.
The chosen constraint appears at the top of the table in the Metrics and Requirements tab.
Use the Metrics and Requirements tab to adjust and modify the metrics required for the tradeoff analysis to obtain the desired performance and satisfy your radar design requirements. The tab uses the same color coding as a Stoplight Chart and shows the metrics in the table.
To generate a formatted report of numeric metrics, click
Export on the toolstrip and select Generate
Metrics Report.
| Metric | Description |
|---|---|
| Probability of Detection | Probability of detection, specified as a dimensionless scalar. This
is the first entry in the table if you specify Given the
maximum range Rmax specified in
SNRav(Rmax) = Dx(Pd,Pfa,N,SW), where SNRav is the Available Signal-to-Noise Ratio, Dx is the effective Detectability Factor, Pfa is the chosen probability of false alarm, N is the number of received pulses, and SW is the Swerling signal model. |
| Max Range | Maximum range, specified as a scalar in
Given the desired probability of detection
Pd specified in SNRav(Rmax) = Dx(Pd,Pfa,N,SW), where SNRav is the Available Signal-to-Noise Ratio, Dx is the effective Detectability Factor, Pfa is the chosen probability of false alarm, N is the number of received pulses, and SW is the Swerling signal model. |
| Min Detectable Signal | Minimum detectable signal, specified as a scalar in
The minimum detectable signal is computed using MDS = kTsBDx, where k is Boltzmann's constant, Ts is the system noise temperature, B is the bandwidth, and Dx is the detectability factor. |
| Min Range | Minimum range, specified as a scalar in
The minimum range is computed using Rmin = cτ/2, where c is the speed of light and τ is the pulse duration. |
| Unambiguous Range | Unambiguous range, specified as a scalar in
The unambiguous range is computed using Rua = c × PRI/2 = c/(2 × PRF), where c is the speed of light, PRI is the pulse repetition interval, and PRF is the pulse repetition frequency. |
| Range Resolution | Range resolution, specified as a scalar in
The range resolution is computed using δR = c/(2 × B), where c is the speed of light and B is the pulse bandwidth. |
| First Blind Speed | First blind speed, specified as a scalar in m/s. The first blind speed is computed using Vb = λ × PRF/2, where λ is the radar wavelength and PRF is the pulse repetition frequency. For reference, the maximum unambiguous radial velocity (unambiguous Doppler) differs from the first blind speed by a factor of 2 and is computed using Vrmax = λ × PRF/4. |
| Range Rate Resolution | Range rate resolution, specified as a scalar in m/s. The range rate resolution is computed using δVr = λ × PRF/(2N), where λ is the radar wavelength, PRF is the pulse repetition frequency, and N is the number of received pulses. |
| Range Accuracy | Range accuracy, specified as a scalar in
The range accuracy for a linear frequency modulated (LFM) pulse is computed using where c is the speed of light, SNR is the available signal-to-noise ratio, B is the pulse bandwidth, and br2 is the range bias. |
| Azimuth Accuracy | Azimuth accuracy, specified as a scalar in
The azimuth accuracy for an M-element uniform linear array (ULA) is computed using where θe is the azimuth beamwidth, SNR is the available signal-to-noise ratio, k is the beamwidth factor (k = 0.89 for a ULA), and bθ is the azimuth bias. |
| Elevation Accuracy | Elevation accuracy, specified as a scalar in
The elevation accuracy for an M-element uniform linear array (ULA) is computed using where θe is the elevation beamwidth, SNR is the available signal-to-noise ratio, k is the beamwidth factor (k = 0.89 for a ULA), and bθ is the elevation bias. |
| Range Rate Accuracy | Range rate accuracy, specified as a scalar in m/s. The range rate accuracy for N pulses coherently processed during a coherent processing interval is computed using where PRF is the pulse repetition frequency, λ is the radar wavelength, SNR is the available signal-to-noise ratio, B is the pulse bandwidth, and brr is the range rate bias. |
| Probability of True Track | Probability of true track, specified as a dimensionless scalar. The probability of true track is computed using the
common gate history algorithm. For more details, see |
| Probability of False Track | Probability of false track, specified as a dimensionless scalar. The probability of false track is computed using the
common gate history algorithm. For more details, see |
| Effective Isotropic Radiated Power | Effective isotropic radiated power, specified as a scalar in
The effective radiated power is computed using ERP = PtGtx, where Pt is the peak transmitted power and Gtx is the transmitter antenna gain. |
| Power-Aperture Product | Power-aperture product, specified as a scalar in
|
View Results
View plots in the Radar Comparison tab. By default, Radar Designer displays the SNR vs Range plot.
Select additional plot types from the View Results gallery on the toolstrip.
Each selected plot will appear as a separate tab beneath Radar
Comparison. Toggle to Plots for Radar Comparison
using the arrow on the right hand side of the View Results
gallery, if necessary.
SNR vs Range — View signal-to-noise ratio versus range for all designs
To visualize the signal-to-noise ratio (SNR) as a function of range for your radar designs, click SNR vs Range on the toolstrip.
Radar Designer displays the SNR in dB and shows the horizon range. The plot shows the maximum range requirements and a Stoplight Chart based on the detectability factor (required SNR) values.
This plot shows the signal-to-noise ratio plot for one airborne radar with the default settings. For more information, see Radar Designer Configurations.
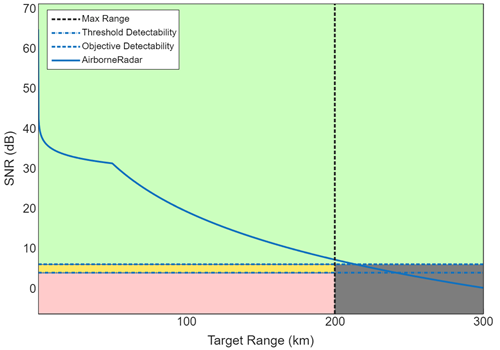
To generate a script to recreate the signal-to-noise ratio plot for the currently selected radar, click Export on the toolstrip and select
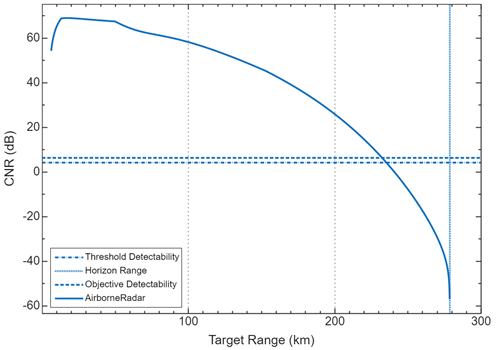
Export Detectability Analysis MATLAB Script.CNR vs Range — View clutter-to-noise ratio versus range for all designs
To visualize the clutter-to-noise ratio (CNR) as a function of range for your radar designs, click CNR vs Range on the toolstrip.
Radar Designer displays the CNR in dB and shows the horizon range.
This plot shows the clutter-to-noise ratio plot for one airborne radar with an atmosphere over a land surface. For more information, see Radar Designer Configurations.
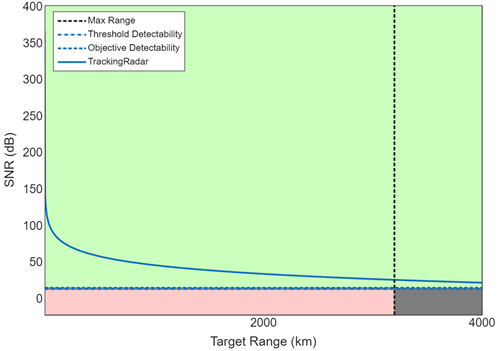
Pd vs Range — Show probability of detection (Pd) versus range for all designs
To visualize the probability of detection as a function of range for your radar designs, click Pd vs Range on the toolstrip.
Radar Designer displays the probability of detection at the output of the receiver (effective Pd) as a function of the target range. The plot shows the maximum range requirements and a Stoplight Chart based on the desired Pd values.
This plot shows the probability of detection versus range plot for one tracking radar with the default settings. For more information, see Radar Designer Configurations.
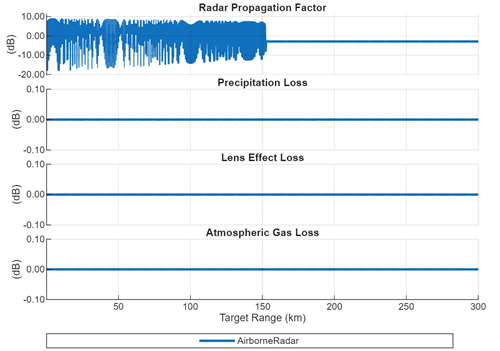
Environmental Losses — View environmental losses for the currently selected radar
To visualize the range-dependent loss components for your radar designs in their operation environments, click Environmental Losses on the toolstrip.
Radar Designer displays four range-dependent loss components that correspond to different atmospheric and propagation effects:
Precipitation loss
Atmospheric gas loss
Lens-effect loss
Radar propagation factor
This plot shows the environmental losses plot for one airport radar with the default settings using a high-latitude atmosphere model. For more information, see Radar Designer Configurations.
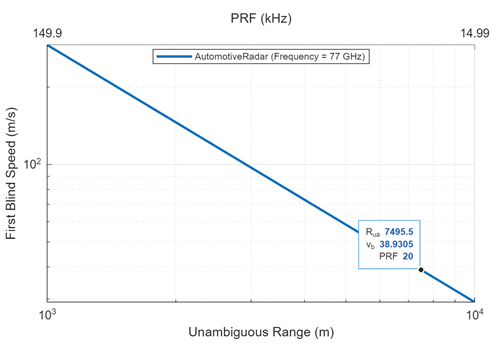
Range/Doppler Coverage — Explore range/Doppler space for the currently selected radar
To visualize the ambiguity-free range/Doppler coverage regions for your radar designs, click Range/Doppler Coverage on the toolstrip.
Radar Designer displays a log-log plot of first blind speed as a function of unambiguous range (lower x-axis) and PRF (upper x-axis). Each solid line on the plot represents a radar design. Designs with different carrier frequencies appear as parallel lines.
This plot shows the range/Doppler coverage plot for one automotive radar with the default settings. For more information, see Radar Designer Configurations.
View plots in the Selected Radar tab. By default, Radar Designer displays the Scenario Geometry plot.
Select additional plot types from the View Results gallery on the toolstrip.
Each selected plot will appear as a separate tab beneath Selected
Radar. Toggle to Plots for Selected Radar using
the arrow on the right hand side of the View Results gallery,
if necessary.
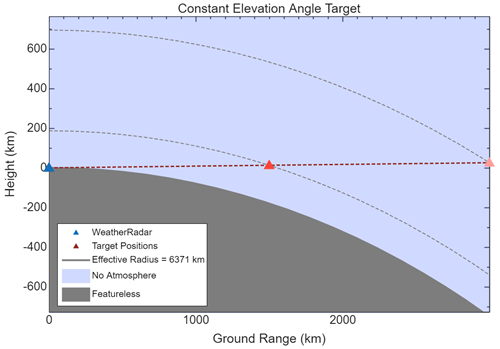
Scenario Geometry — View scenario geometry for all designs
To visualize the scenario geometry for your radar designs, click Scenario Geometry on the toolstrip.
Radar Designer displays target height and position at various ranges (constant elevation angle). The radar antenna height, environment (effective Earth radius, free space), and radar antenna pattern demonstrating the applied tilt angle are also shown.
This plot shows the scenario geometry plot for one weather radar with the default settings on a curved Earth. For more information, see Radar Designer Configurations.
Antenna Pattern — View 3D effective antenna pattern (since R2025a)
To visualize the 3D effective antenna pattern for your radar designs, click Antenna Pattern on the toolstrip.
Radar Designer displays the normalized antenna power radiation pattern in dB. The x-axis corresponds to a fixed azimuth angle of 0° and an elevation angle of 0°, the y-axis has an azimuth angle of 90° and an elevation angle of 0°, and the z-axis has an azimuth angle of 0° and an elevation of 90°.
This plot shows the 3D antenna pattern plot for one airport radar with the default settings. For more information, see Radar Designer Configurations.

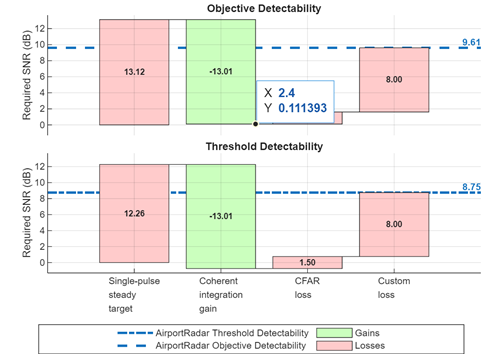
Link Budget — Inspect gains and losses of the currently selected radar
To visualize the gains and losses for your radar designs, click Link Budget on the toolstrip.
Radar Designer models several components of the radar signal processing chain that affect the resulting Detectability Factor. The app displays a waterfall chart that shows the individual losses and gains that contribute to increasing the required signal energy. This chart is called the radar link budget.
The losses, represented in red, increase the required SNR threshold.
The gains, represented in green, decrease the required SNR threshold.
Scan the plot left to right to see how the detectability factor changes as these components are added:
Steady-target single-pulse detectability
Integration gain
Fluctuation loss
Binary integration loss
CFAR loss
Eclipsing loss
MTI loss
Beam shape loss
Scan sector loss
This plot shows the link budget plot for one airport radar with the default settings. For more information, see Radar Designer Configurations.
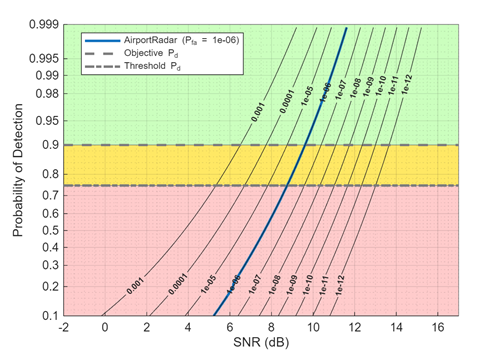
Pd vs SNR — Show probability of detection (Pd) versus SNR for all designs.
To visualize the probability of detection as a function of SNR for your radar designs, click Pd vs SNR on the toolstrip.
Radar Designer displays the probability of detection at the output of the receiver (effective Pd) as a function of the received SNR. The plot shows the SNR requirements and a Stoplight Chart based on the desired Pd values.
This plot shows the probability of detection versus SNR plot for one airport radar with the default settings. For more information, see Radar Designer Configurations.
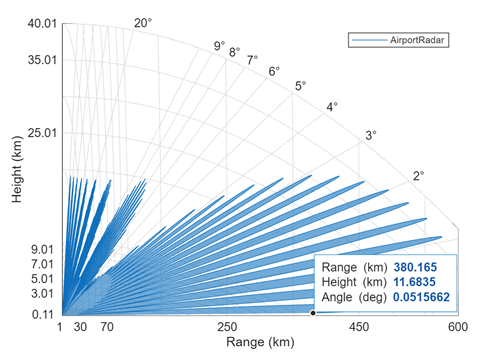
Vertical Coverage — Plot Blake chart for the currently selected radar
To visualize the range-height-angle relationships for your radar designs, click Vertical Coverage on the toolstrip.
Radar Designer displays a vertical coverage diagram of the selected radar. Vertical coverage diagrams, also known as range-height-angle charts or Blake charts, show the relationship between the range to a target, the height of the target, and the initial elevation angle of the transmitted rays for the sensor.
This plot shows the vertical coverage diagram for one airport radar with the curved earth model. For more information, see Radar Designer Configurations.
To generate a script to recreate the vertical coverage plot for the currently selected radar, click Export on the toolstrip and select
Export Vertical Coverage MATLAB Script.
Export Scripts
Export to the MATLAB Workspace.
Export Detectability Analysis MATLAB Script— Generate script to recreate SNR vs Range, Pd vs Range, Environmental Losses, and Link Budget plotsTo generate a script to recreate the signal-to-noise ratio, probability of detection, environmental losses, and link budget plots for the currently selected radar, click Export on the toolstrip and select
Export Detectability Analysis MATLAB Script.Export Vertical Coverage MATLAB Script— Generate script to recreate vertical coverage plotTo generate a script to recreate the vertical coverage plot for the currently selected radar, click Export on the toolstrip and select
Export Vertical Coverage MATLAB Script.Generate Metrics Report— Generate formatted report of numeric metricsTo generate a formatted report of numeric metrics for the currently selected radar, click Export on the toolstrip and select
Generate Metrics Report.Export Radar Data Generator MATLAB Script— Generate script to simulate the selected radar detecting a target in a dynamic scenario (since R2024b)To generate a script that sets up a
radarDataGeneratorsimulation within aradarScenariofor the currently selected radar, click the Export button on the toolstrip and selectExport Radar Data Generator MATLAB Script.The export script supports atmospheric refraction. Although Radar Designer uses the effective Earth radius model for atmospheric refraction calculations,
radarDataGeneratoralso supports the CRPL exponential model. Therefore, you can select eitherAtmospheric Refraction Using Effective Earth RadiusorAtmospheric Refraction Using CRPL Exponential Modelin theExport Radar Data Generator MATLAB Scriptdrop-down menu. To enable refraction, set Free Space toFalseand select an Atmosphere Model in the Radar Designer Environment tab. (since R2025a)Electronic and mechanical scanning radar configurations are also supported in the export script. (since R2025a)
Programmatic Use
More About
Radar Designer includes radar configurations that enable you to switch between radar designs, duplicate radars, and delete radars.
This table shows the default parameter values for the built-in configurations.
| Category | Property | Radar | ||||
|---|---|---|---|---|---|---|
| Airborne Radar | Airport Radar | Automotive Radar | Tracking Radar | Weather Radar | ||
| General | Icon | |||||
| Description | Long-range airborne surveillance radar | Terminal airport surveillance | Automotive radar for use in applications such as automatic cruise control | Ground-based, cued tracking radar system | Clear air weather radar | |
| Inspired By | Airborne scenario presented in [5] | ASR-9 | Bosch LRR3, TI Radars | COBRA DANE | NEXRAD (VCP 32) | |
| Main | Frequency | 450 MHz | 2.8 GHz | 77 GHz | 1.25 GHz | 2.8 GHz |
| Frequency band | UHF | S | W | L | S | |
| Bandwidth | 4 MHz | 1.5 MHz | 300 MHz | 20 MHz | 0.5 MHz | |
| Peak power | 200 kW | 1.1 MW | 30 mW | 15 MW | 500 kW | |
| Pulse width | 200 μs | 1 μs | 50 μs | 1 ms | 1.5 μs | |
| PRF | 300 Hz | 1 kHz | 20 kHz | 1 kHz | 320 Hz | |
| Hardware | Noise temperature | 1500 K (8 dB noise figure with reference temperature of 290K) | 950 K | 8000 K | 800 K | 450 K |
| Antenna and scanning | Antenna height | 6096 m (20,000 ft) | 10 m | 1 m | 75 m | 20 m |
| Antenna tilt | –1° | 0.5° | 0 | 10° | 0.5° | |
| Polarization | Horizontal | Horizontal | Horizontal | Horizontal | Horizontal | |
| Gain | From beamwidth | From beamwidth | From beamwidth | From beamwidth | Manual | |
| Azimuth: 8° | Azimuth: 1.5° | Azimuth: 30° | Azimuth: 1° | 45 dB | ||
| Elevation: 90° | Elevation: 5° | Elevation: 10° | Elevation: 1° | |||
| Scan mode | Electronic | Mechanical | N/A | N/A | Mechanical | |
| Azimuth ±30° | Full 360° | Volume scan: Azimuth: Full 360°. Elevation: 0.5° to 5° | ||||
| Scan time | 0.05 s | 5 s | N/A | N/A | 10 minutes | |
| Detection | Probability of false alarm | 10–6 | 10–6 | 10–6 | 10–6 | 10–3 |
| Number of pulses in CPI | 18 | 20 | 256 | 1 | 64 | |
| Number of CPIs | 1 | 1 | 1 | 1 | 1 | |
| Losses and other inputs | Custom loss | 4 dB | 8 dB | 2 dB | 2 dB | 2 dB |
| Other inputs | STC 'on' with default parameters | CFAR 'on' with default parameters | N/A | N/A | N/A | |
CFAR 'on' with default parameters | ||||||
MTI 'on' with default parameters | MTI 'on' with default parameters | |||||
| Receive gain: 10 dB | ||||||
Tips
Use Ctrl+Z to undo a modification. Use Ctrl+Y to redo an undone modification.
References
[1] Recommendation ITU-R P.835-6 (12/2017). "Reference Standard Atmospheres." Geneva: International Telecommunication Union, 2017.
[2] Barton, David K. Radar Equations for Modern Radar. Norwood, MA: Artech House, 2013.
[3] Gunn, K. L. S., and T. W. R. East. “The Microwave Properties of Precipitation Particles.” Quarterly Journal of the Royal Meteorological Society 80, no. 346 (October 1954): 522–45. https://doi.org/10.1002/qj.49708034603.
[4] O'Donnell, R. M. "Radar Systems Engineering." IEEE AES Society, IEEE New Hampshire Section, Radar Systems Course, January 2010.
[5] Ward, J. "Space-Time Adaptive Processing for Airborne Radar." TR-1015, MIT Lincoln Laboratory, December 1994. https://apps.dtic.mil/sti/tr/pdf/ADA293032.pdf
[6] Wasson, Charles S. System Engineering Analysis, Design, and Development: Concepts, Principles, and Practices. Second edition. Wiley Series in Systems Engineering and Management. Hoboken, New Jersey: John Wiley & Sons Inc, 2016.
Version History
Introduced in R2021a