phased.AngleDopplerScope
Angle-Doppler scope
Description
The phased.AngleDopplerScope
System object™ creates a scope for displaying an angle-Doppler response map. The map is a 2-D
representation of response intensity as a function of angle and Doppler shift. You can input
two types of data - in-phase and quadrature (I/Q) data and response data.
I/Q data – The data consists of I/Q samples at the same range from multiple sensors over all pulses or sweeps. The scope computes and displays the response map. To use I/Q data, set the
IQDataInputproperty totrue. In this mode, you can set the properties listed in Properties Applicable to I/Q Data.Response data – The data consists of the angle-Doppler response itself. The scope only displays the angle-Doppler response map. You can obtain angle-Doppler response data from the
phased.AngleDopplerResponseobject. To display response data, set theIQDataInputproperty tofalse. In this mode, you can set the properties listed in Properties Applicable to Response Data.
To display an angle-Doppler response map using a scope,
Create the
phased.AngleDopplerScopeobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
scope = phased.AngleDopplerScopescope
System object for displaying the angle-Doppler response map.
scope = phased.phased.AngleDopplerScope(Name,Value)scope with each specified property set to the
specified value. You can specify additional name-value pair arguments in any order as
(Name1,Value1,...,NameN,ValueN).
Enclose property names in quotes. For
example,
scope = phased.AngleDopplerScope('IQInputData',true, ...
'NumAngleSamples',128,'NumDopplerSamples',64)Properties
Usage
Syntax
Description
scope(X)X. This
syntax applies when you set the IQDataInput property to
true.
Input Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
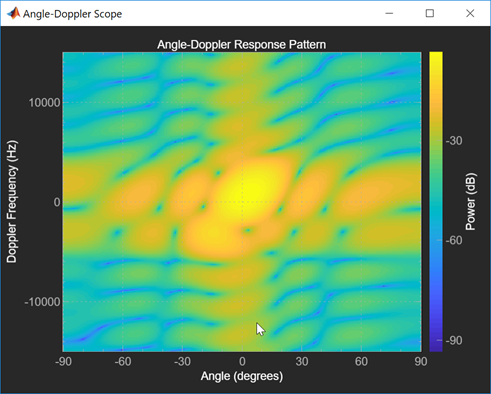
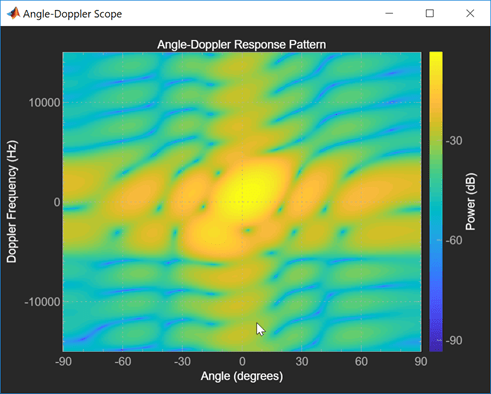
Calculate and visualize the angle-Doppler response at a single range cell of a collected data cube.
Load the I/Q data and analyze the 43th range cell.
load STAPExampleData;
x = shiftdim(STAPEx_ReceivePulse(43,:,:));Create a scope object that processes I/Q data.
scope = phased.AngleDopplerScope( ... 'IQDataInput', true, ... 'Name','Angle-Doppler Scope', ... 'Position',[560 375 560 420], ... 'NormalizeDoppler',false, ... 'ResponseUnits','db', ... 'SensorArray',STAPEx_HArray, ... 'OperatingFrequency',STAPEx_OperatingFrequency, ... 'PropagationSpeed',STAPEx_PropagationSpeed, ... 'PRF',STAPEx_PRF,'NumDopplerSamples',512);
Compute and visualize the angle-Doppler response.
scope(x)

More About
Version History
Introduced in R2019aSee Also
show | hide | isVisible | phased.AngleDopplerResponse | phased.RangeAngleScope | phased.RangeDopplerScope