sampleStartGoal
Syntax
Description
[
selects a valid start and goal state from an input map environment. By default, the function
makes a maximum of 100 attempts to select the states.startState,goalState] = sampleStartGoal(stateValidator)
[
specifies the number of valid start and goal states to select from an input map environment.
By default, the function makes a maximum of 100 attempts to select the specified number of
states. If the function is not able to find the specified number of states within 100
attempts, it returns the states that are identified.startState,goalState] = sampleStartGoal(stateValidator,numStates)
[___] = sampleStartGoal(
specifies the maximum number of attempts to select the specified number of start and goal
states. Use this syntax to increase the maximum number of attempts in order to get the
desired number of states.stateValidator,numStates,maxAttempts)
Examples
Set the seed value to generate repeatable results.
rng("default")Load a vehicleCostMap object, which contains the input map environment for motion planning.
load sampleMapData.matDefine the lower and upper limits of the state space variables x, y, and theta from the costmap. The values of the state bounds must be close to or same as that of the map limits.
x = [0 30]; y = [0 30]; theta = [-pi pi]; StateBounds = [x; y; theta];
Create a state space SE(2) object using the specified state space variables. Check the validity of states in the input state space by using validatorVehicleCostmap.
ss= stateSpaceSE2(StateBounds); sv = validatorVehicleCostmap(ss,Map=map);
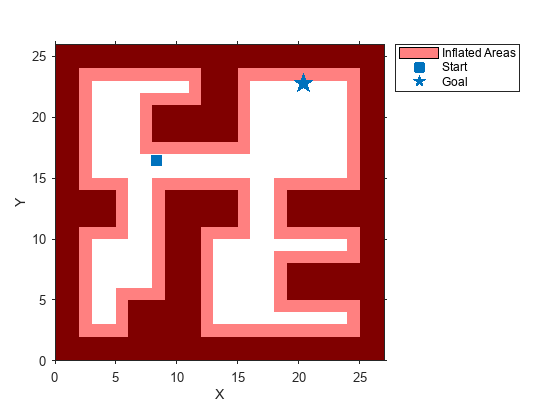
Select a start state and goal state by using the sampleStartGoal function.
[start, goal] = sampleStartGoal(sv)
start = 1×3
8.3549 16.4064 2.8746
goal = 1×3
20.3621 22.7322 1.5276
plot(map) legend(Location="BestOutside") hold on plot(start(:,1),start(:,2),plannerLineSpec.start{:}) plot(goal(:,1),goal(:,2),plannerLineSpec.goal{:}) hold off
Set the seed value to generate repeatable results.
rng(5,"twister")Load a probability occupancy grid into the MATLAB® workspace.
load("exampleMaps.mat","simpleMap");
Create an occupancy map from the input occupancy grid.
map = occupancyMap(simpleMap);
Define the lower and upper limits of the state space variables x, y, and theta from the occupancy map.
x = map.XWorldLimits; y = map.YWorldLimits; theta = [-pi pi];
Create a state space SE(2) object using the specified state variables.
stateSpace = stateSpaceSE2([x; y; theta]);
Check the validity of the states in the input state space by using a state validator.
stateValidator = validatorOccupancyMap(stateSpace,Map=map);
Select the start point and the goal point in the input state space. Specify the number of states to select as 3.
[startStates,goalStates] = sampleStartGoal(stateValidator,3);
Plot the start points and the goal points by using the plannerLineSpec.start and plannerLineSpec.goal functions, respectively.
fig1 = figure(Position=[0,0,1200,300]); for cnt = 1:3 start = startStates(cnt,:); goal = goalStates(cnt,:); subplot(1,3,cnt,Parent=fig1) show(map) hold on plot(start(1),start(2),plannerLineSpec.start{:}); plot(goal(1),goal(2),plannerLineSpec.goal{:}); hold off legend end
![Figure contains 3 axes objects. Axes object 1 with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, line. One or more of the lines displays its values using only markers These objects represent Start, Goal. Axes object 2 with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, line. One or more of the lines displays its values using only markers These objects represent Start, Goal. Axes object 3 with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, line. One or more of the lines displays its values using only markers These objects represent Start, Goal.](../../examples/nav/win64/SelectStartAndGoalStatesUsing2DOccupancyMapExample_01.png)
Set the seed value to generate repeatable results.
rng(2,"twister")Load a 3-D occupancy map of a city block into the workspace. Specify a threshold for which cells to consider as obstacle-free.
mapData = load('dMapCityBlock.mat');
omap = mapData.omap;
omap.FreeThreshold = 0.5;Inflate the occupancy map to add a buffer zone for safe operation around the obstacles.
inflate(omap,1)
Create an SE(3) state space object with bounds for state variables.
ss = stateSpaceSE3([-20 220;
-20 220;
-10 100;
inf inf;
inf inf;
inf inf;
inf inf]);Create a 3-D occupancy map state validator using the created state space.
sv = validatorOccupancyMap3D(ss);
Assign the occupancy map to the state validator object.
sv.Map = omap;
Select the start and goal states from the input map. Specify the number of start and goal states to select as 5.
[start,goal] = sampleStartGoal(sv,5);
Visualize the results.
show(omap) hold on scatter3(start(:,1),start(:,2),start(:,3),'g','filled') scatter3(goal(:,1),goal(:,2),goal(:,3),'r','filled') legend("Map","Start states","Goal states",Location="southoutside"); hold off
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 3 objects of type patch, scatter. These objects represent Map, Start states, Goal states.](../../examples/nav/win64/SelectStartAndGoalStatesUsing3DOccupancyMapExample_01.png)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2024a
See Also
plannerMPNET | plannerRRT | plannerRRTStar | plannerBiRRT | plannerControlRRT | plannerAStar | plannerAStarGrid | plannerHybridAStar | plannerPRM