reedsSheppConnection
Reeds-Shepp path connection type
Description
The reedSheppConnection object holds information for computing a
reedsSheppPathSegment object to connect between poses. A Reeds-Shepp path
segment connects two poses as a sequence of five motions. The motion options
are:
Straight
Left turn at maximum steer
Right turn at maximum steer
No movement
A Reeds-Shepp path segment supports both forward and backward motion.
Use this connection object to define parameters for a vehicle motion model, including the
minimum turning radius and options for path types. To generate a path segment between poses
using this connection type, call the connect
function.
Creation
Properties
Object Functions
connect | Connect poses for given connection type |
Examples
Create a reedsSheppConnection object.
reedsConnObj = reedsSheppConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})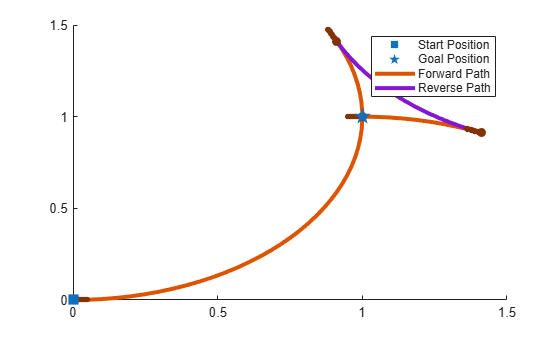
Create a reedsSheppConnection object.
reedsConnObj = reedsSheppConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Show the generated path. Notice the direction of the turns.
show(pathSegObj{1})
pathSegObj{1}.MotionTypesans = 1×5 cell
{'L'} {'R'} {'L'} {'N'} {'N'}
pathSegObj{1}.MotionDirectionsans = 1×5
1 -1 1 1 1
Disable this specific motion sequence in a new connection object. Reduce the MinTurningRadius if the robot is more maneuverable. Increase the reverse cost to reduce the likelihood of reverse directions being used. Connect the poses again to get a different path.
reedsConnObj = reedsSheppConnection('DisabledPathTypes',{'LpRnLp'}); reedsConnObj.MinTurningRadius = 0.5; reedsConnObj.ReverseCost = 5; [pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose); pathSegObj{1}.MotionTypes
ans = 1×5 cell
{'L'} {'S'} {'L'} {'N'} {'N'}
show(pathSegObj{1})
xlim([0 1.5])
ylim([0 1.5])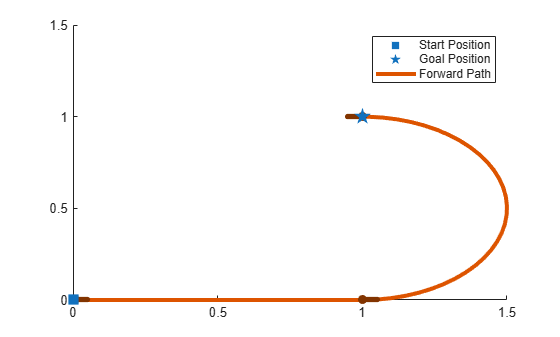
Extended Capabilities
Version History
Introduced in R2019b