e57FileReader
Description
An e57FileReader object stores the metadata present in an E57
file as read-only properties. Use these properties with the readPointCloud
object function to read point cloud data from the file.
The E57 file format, specified by the American Society for Testing and Materials (ASTM),
stores data in a hierarchical tree structure based on XML data format. You can store multiple
point clouds and images along with the metadata of the associated sensors. Each E57 file
contains a Data3D element that stores the point cloud data and an
Images2D element that stores images. For more information on the file
format, see E57 File Format.
Creation
Description
e57Reader = e57FileReader(fileName)e57FileReader object that reads point cloud data from an E57
file. The fileName argument, which specifies the absolute or
relative path to the E57 file, sets the FileName object property.
You specify fileName as character vector or string scalar.
Properties
Object Functions
readPointCloud | Read point cloud data from E57 file |
readCRS | Read coordinate reference system data from E57 file |
Examples
Download a ZIP file containing an E57 file, and then unzip the file.
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/e57ParkingLot.zip"); saveFolder = fileparts(zipFile); e57FileName = [saveFolder filesep 'parkingLot.e57']; if ~exist(e57FileName,"file") unzip(zipFile,saveFolder) end
Create an e57FileReader object using the downloaded E57 file.
e57Reader = e57FileReader(e57FileName);
Define a variable for storing point clouds, ptCloudArr and their corresponding poses, tformArr.
ptCloudArr = []; tformArr = [];
Read the point cloud data.
for i = 1:e57Reader.NumPointClouds [ptCloud,pcMetadata] = readPointCloud(e57Reader,i); for j = 1:numel(ptCloud) ptCloudArr = [ptCloudArr ptCloud(j)]; tformArr = [tformArr pcMetadata.RelativePose]; end end
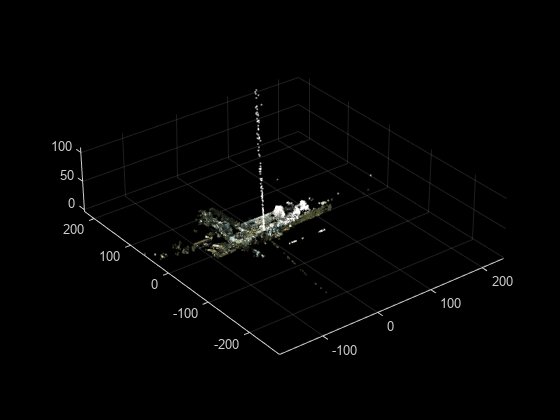
Align the point clouds from the file to create a map.
pcMap = pcalign(ptCloudArr,tformArr);
Display the map.
figure pcshow(pcMap)
Algorithms
The E57 file format is a general purpose, open standard format that stores point cloud data from lidar sensors, 3-D scanners, and stereo vision systems, as well as stores 2-D image data produced by cameras. The format can also store the core metadata associated with the sensors that captured its data. This file format is flexible and easy to interpret.
Each E57 file has a hierarchical tree structure based on the XML format. An E57 file has a header, a binary section, and an XML section.
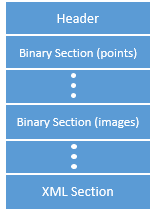
Header — Contains information such as the file version number and the location of the XML section.
Binary section — Contains the actual data of the point clouds and images.
XML section — Contains a hierarchical tree that references the data stored in the binary section.
This figure shows the typical structure of the XML section.

The
E57Rootelement is the root node of the XML hierarchy. It stores point clouds and images in a common file coordinate system. The structure also contains additional file information, such as file creation date and time.Data3Delement stores each point cloud as an individual structure. Each structure stores the pose information and individual point attributes of the point cloud.Images2Delement stores images as individual structures, similar to theData3Delement.For more information on the E57 file format, see the standard specification on the ASTM INTERNATIONAL website.