ifanbeam
Inverse fan-beam transform
Description
I = ifanbeam(F,D)I from fan-beam
projection data in F. Each column of
F contains fan-beam projection data at
one rotation angle. The angle between sensors is assumed to be
uniform and equal to the increment between fan-beam rotation angles.
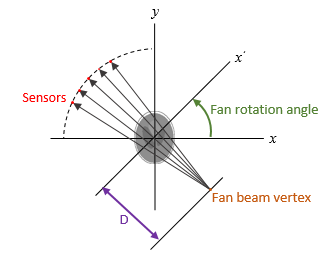
D is the distance from the fan-beam
vertex to the center of rotation.
I = ifanbeam(F,D,Name=Value)
Examples
Create a sample image. The phantom function creates a phantom head image.
ph = phantom(128);
Create a fan-beam transformation of the phantom head image.
d = 100; F = fanbeam(ph,d);
Reconstitute the phantom head image from the fan-beam representation. Display the original image and the reconstituted image.
I = ifanbeam(F,d); imshow(ph)

figure imshow(I);
Create a sample image. The phantom function creates a phantom head image.
ph = phantom(128);
Create a radon transformation of the image.
P = radon(ph);
Convert the transformation from parallel beam projection to fan-beam projection.
[F,obeta,otheta] = para2fan(P,100,... 'FanSensorSpacing',0.5,... 'FanCoverage','minimal',... 'FanRotationIncrement',1);
Reconstitute the image from fan-beam data.
phReconstructed = ifanbeam(F,100,... 'FanSensorSpacing',0.5,... 'Filter','Shepp-Logan',... 'OutputSize',128,... 'FanCoverage','minimal',... 'FanRotationIncrement',1);
Display the original and the transformed image.
imshow(ph)

figure imshow(phReconstructed)
Input Arguments
Fan-beam projection data, specified as a
numSensors-by-numAngles
numeric matrix. numSensors is the
number of fan-beam sensors and
numAngles is the number of
fan-beam rotation angles. Each column of
F contains the fan-beam sensor
samples at one rotation angle.
Data Types: double | single
Distance in pixels from the fan-beam vertex to the
center of rotation, specified as a positive number.
ifanbeam assumes that the
center of rotation is the center point of the
projections, which is defined as
ceil(size(F,1)/2).
Data Types: double | single
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Example: I = ifanbeam(F,D,FanRotationIncrement=5)
specifies a fan rotation increment of 5 degrees.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: I =
ifanbeam(F,D,"FanRotationIncrement",5)
Fan-beam rotation angle increment in degrees, specified as a positive scalar.
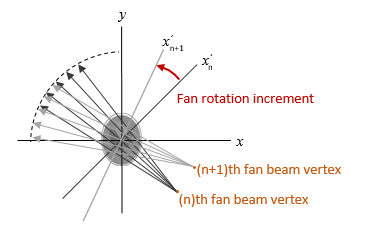
Data Types: double
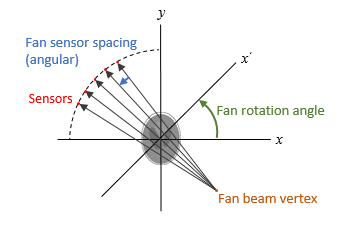
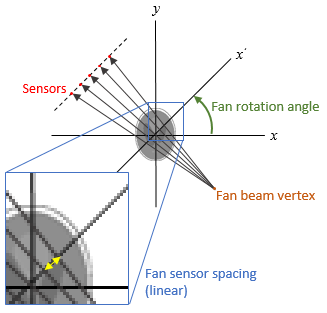
Fan-beam sensor positioning, specified as "arc" or
"line".
Value | Meaning | Diagram |
|---|---|---|
| Sensors are spaced at equal angles along a circular arc. The center of the arc is the fan-beam vertex.
|
|
| Sensors are spaced at equal distances along a line that is
parallel to the x' axis. The closest sensor
is distance
|
|
Filter to use for frequency domain filtering,
specified as one of the values in the table. For
more information, see iradon.
Value | Description |
|---|---|
| Cropped Ram-Lak or ramp filter. The
frequency response of this filter is |
|
| Multiplies the Ram-Lak filter by a
|
| Multiplies the Ram-Lak filter by a
|
| Multiplies the Ram-Lak filter by a Hamming window |
| Multiplies the Ram-Lak filter by a Hann window |
"None" | No filtering. ifanbeam
returns unfiltered data. |
Data Types: char | string
Scale factor for rescaling the frequency axis,
specified as a positive number in the range (0,
1]. If FrequencyScaling is
less than 1, then the filter is compressed to fit
into the frequency range [0,
FrequencyScaling], in
normalized frequencies; all frequencies above
FrequencyScaling are set to
0. For more information, see
iradon.
Data Types: double
Type of interpolation used between the parallel-beam and fan-beam data, specified as one of these values.
"nearest" —
Nearest-neighbor
"linear" — Linear (the
default)
"spline" — Piecewise cubic
spline
"pchip" — Piecewise cubic
Hermite (PCHIP)
Data Types: char | string
Size of the reconstructed image, specified as a positive integer. The image has an equal number of rows and columns.
If you specify
OutputSize, then
ifanbeam reconstructs a
smaller or larger portion of the image but does
not change the scaling of the data.
Note
If the projections were calculated with the
fanbeam function, then the
reconstructed image might not be the same size as
the original image.
If you do not specify
OutputSize, then the size is
calculated automatically by:
OutputSize = 2*floor(size(R,1)/(2*sqrt(2)))where R is the length of
parallel-beam projection data used by iradon. For more information, see
Algorithms.
Data Types: double
Output Arguments
Tips
Algorithms
ifanbeam converts the fan-beam data to parallel beam
projections and then uses the filtered back projection algorithm to perform
the inverse Radon transform. The filter is designed directly in the
frequency domain and then multiplied by the FFT of the projections. The
projections are zero-padded to a power of 2 before filtering to prevent
spatial domain aliasing and to speed up the FFT.
References
[1]
Version History
Introduced before R2006a