fan2para
Convert fan-beam projections to parallel-beam
Description
P = fan2para(F,D,Name=Value)
[
returns the parallel-beam sensor locations in P,paraSensorPos,paraRotAngles] = fan2para(___)paraSensorPos and
rotation angles in paraRotAngles.
Examples
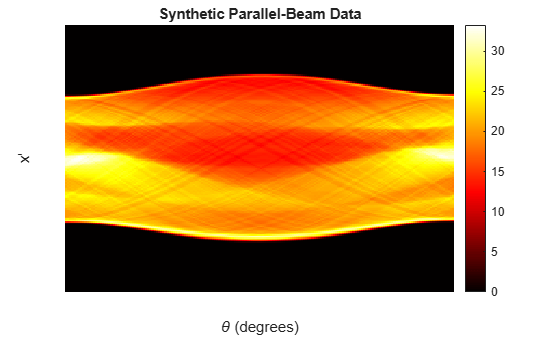
Create synthetic parallel-beam data.
ph = phantom(128);
Calculate the parallel beam transform and display it.
theta = 0:179; [Psynthetic,xp] = radon(ph,theta); imshow(Psynthetic,[],... 'XData',theta,'YData',xp,'InitialMagnification','fit') axis normal title('Synthetic Parallel-Beam Data') xlabel('\theta (degrees)') ylabel('x''') colormap(gca,hot), colorbar
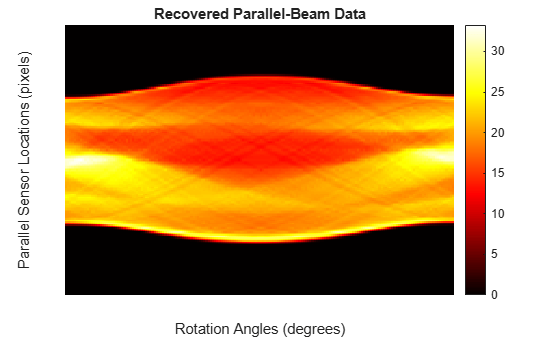
Convert the parallel-beam data to fan-beam.
Fsynthetic = para2fan(Psynthetic,100,'FanSensorSpacing',1);Recover original parallel-beam data.
[Precovered,Ploc,Pangles] = fan2para(Fsynthetic,100,... 'FanSensorSpacing',1,... 'ParallelSensorSpacing',1); figure imshow(Precovered,[],... 'XData',Pangles,'YData',Ploc,'InitialMagnification','fit') axis normal title('Recovered Parallel-Beam Data') xlabel('Rotation Angles (degrees)') ylabel('Parallel Sensor Locations (pixels)') colormap(gca,hot), colorbar
Input Arguments
Fan-beam projection data, specified as a numeric matrix. Each column of
F contains the fan-beam data at one rotation angle. The number of
columns indicates the number of fan-beam rotation angles and the number of rows
indicates the number of fan-beam sensors.
Data Types: double | single
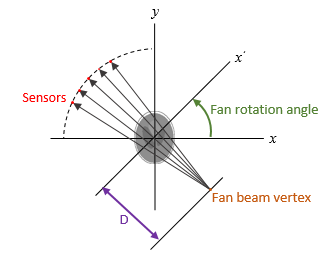
Distance in pixels from the fan beam vertex to the center of rotation, specified as
a positive number. fan2para assumes that the center of rotation is
the center point of the projections, which is defined as
ceil(size(F,1)/2). The figure illustrates D in
relation to the fan-beam vertex for one fan-beam projection.
Data Types: double | single
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Example: P = fan2para(F,D,FanRotationIncrement=5) specifies a fan
rotation increment of 5 degrees.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: P = fan2para(F,D,"FanRotationIncrement",5)
Fan-beam rotation angle increment in degrees, specified as a positive scalar.
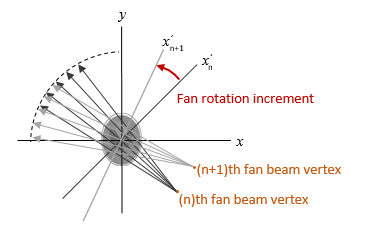
Data Types: double
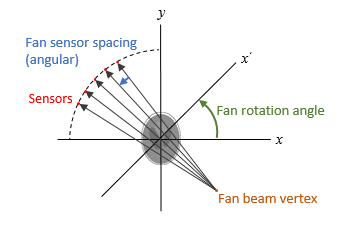
Fan-beam sensor positioning, specified as "arc" or
"line".
Value | Meaning | Diagram |
|---|---|---|
| Sensors are spaced at equal angles along a circular arc. The center of the arc is the fan-beam vertex.
|
|
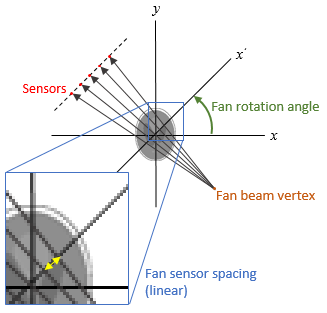
| Sensors are spaced at equal distances along a line that is
parallel to the x' axis. The closest sensor
is distance
|
|
Type of interpolation used between the parallel-beam and fan-beam data, specified as one of these values.
"nearest" — Nearest-neighbor
"linear" — Linear (the default)
"spline" — Piecewise cubic spline
"pchip" — Piecewise cubic Hermite (PCHIP)
Range of parallel-beam rotation, specified as "halfcycle" or
"cycle".
"cycle"— Parallel data covers the full range of [0, 360) degrees."halfcycle"— Parallel data covers [0, 180) degrees.
Parallel-beam rotation angle increment in degrees, specified as a positive scalar
k such that 180/k is an
integer. If you do not specify ParallelRotationIncrement, then
the default value is equal to FanRotationIncrement.
Data Types: double
Parallel-beam sensor spacing in pixels, specified as a positive scalar. The range
of parallel-beam sensor locations is computed from the range of fan angles,
fanAngles, according to: [.D*sin(min(fanAngles))
D*sin(max(fanAngles))]
If you do not specify ParallelSensorSpacing, then the spacing
is assumed to be uniform and is set to the minimum spacing implied by the fan angles
and sampled over the range implied by the fan angles.
Data Types: double
Output Arguments
Version History
Introduced before R2006a