perturbations
Perturbation defined on object
Syntax
Description
perturbs = perturbations(obj)perturbs, defined on the
object, obj. The returned perturbs lists all the
perturbable properties. If any property is not perturbed, then its corresponding
Type is returned as "Null" and its corresponding
Value is returned as {Null,Null}.
perturbs = perturbations(obj,property,'Selection',values,probabilities)property perturbation offset drawn from a set of
values that have corresponding
probabilities.
perturbs = perturbations(obj,property,'TruncatedNormal',mean,deviation,lowerLimit,upperLimit)property perturbation offset drawn from a normal
distribution with specified mean, standard
deviation, lower limit, and upper limit.
perturbs = perturbations(obj,property,'Custom',perturbFcn)perturbFcn, that draws the
perturbation offset value.
Examples
Create a waypointTrajectory object.
traj = waypointTrajectory;
Show the default perturbation properties using the perturbations method.
perturbs = perturbations(traj)
perturbs=2×3 table
Property Type Value
_______________ ______ __________________
"Waypoints" "None" {[NaN]} {[NaN]}
"TimeOfArrival" "None" {[NaN]} {[NaN]}
Create an insSensor object.
sensor = insSensor
sensor =
insSensor with properties:
MountingLocation: [0 0 0] m
RollAccuracy: 0.2 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: [1 1 1] m
VelocityAccuracy: 0.05 m/s
AccelerationAccuracy: 0 m/s²
AngularVelocityAccuracy: 0 deg/s
TimeInput: 0
RandomStream: 'Global stream'
Define the perturbation on the RollAccuracy property as three values with an equal possibility each.
values = {0.1 0.2 0.3}values=1×3 cell array
{[0.1000]} {[0.2000]} {[0.3000]}
probabilities = [1/3 1/3 1/3]
probabilities = 1×3
0.3333 0.3333 0.3333
perturbations(sensor,'RollAccuracy','Selection',values,probabilities)
ans=7×3 table
Property Type Value
_________________________ ___________ ______________________________________
"RollAccuracy" "Selection" {1×3 cell} {[0.3333 0.3333 0.3333]}
"PitchAccuracy" "None" {[ NaN]} {[ NaN]}
"YawAccuracy" "None" {[ NaN]} {[ NaN]}
"PositionAccuracy" "None" {[ NaN]} {[ NaN]}
"VelocityAccuracy" "None" {[ NaN]} {[ NaN]}
"AccelerationAccuracy" "None" {[ NaN]} {[ NaN]}
"AngularVelocityAccuracy" "None" {[ NaN]} {[ NaN]}
Perturb the sensor object using the perturb function.
rng(2020) perturb(sensor); sensor
sensor =
insSensor with properties:
MountingLocation: [0 0 0] m
RollAccuracy: 0.5 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: [1 1 1] m
VelocityAccuracy: 0.05 m/s
AccelerationAccuracy: 0 m/s²
AngularVelocityAccuracy: 0 deg/s
TimeInput: 0
RandomStream: 'Global stream'
The RollAccuracy is perturbed to 0.5 deg.
Define a waypoint trajectory. By default, this trajectory contains two waypoints.
traj = waypointTrajectory
traj =
waypointTrajectory with properties:
SampleRate: 100
SamplesPerFrame: 1
Waypoints: [2×3 double]
TimeOfArrival: [2×1 double]
Velocities: [2×3 double]
Course: [2×1 double]
GroundSpeed: [2×1 double]
ClimbRate: [2×1 double]
Orientation: [2×1 quaternion]
AutoPitch: 0
AutoBank: 0
ReferenceFrame: 'NED'
Define perturbations on the Waypoints property and the TimeOfArrival property.
rng(2020); perturbs1 = perturbations(traj,'Waypoints','Normal',1,1)
perturbs1=2×3 table
Property Type Value
_______________ ________ __________________
"Waypoints" "Normal" {[ 1]} {[ 1]}
"TimeOfArrival" "None" {[NaN]} {[NaN]}
perturbs2 = perturbations(traj,'TimeOfArrival','Selection',{[0;1],[0;2]})
perturbs2=2×3 table
Property Type Value
_______________ ___________ _______________________________
"Waypoints" "Normal" {[ 1]} {[ 1]}
"TimeOfArrival" "Selection" {1×2 cell} {[0.5000 0.5000]}
Perturb the trajectory.
offsets = perturb(traj)
offsets=2×1 struct array with fields:
Property
Offset
PerturbedValue
The Waypoints property and the TimeOfArrival property have changed.
traj.Waypoints
ans = 2×3
1.8674 1.0203 0.7032
2.3154 -0.3207 0.0999
traj.TimeOfArrival
ans = 2×1
0
2
Create an imuSensor object and show its perturbable properties.
imu = imuSensor; perturbations(imu)
ans=17×3 table
Property Type Value
______________________________________ ______ __________________
"Accelerometer.MeasurementRange" "None" {[NaN]} {[NaN]}
"Accelerometer.Resolution" "None" {[NaN]} {[NaN]}
"Accelerometer.ConstantBias" "None" {[NaN]} {[NaN]}
"Accelerometer.NoiseDensity" "None" {[NaN]} {[NaN]}
"Accelerometer.BiasInstability" "None" {[NaN]} {[NaN]}
"Accelerometer.RandomWalk" "None" {[NaN]} {[NaN]}
"Accelerometer.TemperatureBias" "None" {[NaN]} {[NaN]}
"Accelerometer.TemperatureScaleFactor" "None" {[NaN]} {[NaN]}
"Gyroscope.MeasurementRange" "None" {[NaN]} {[NaN]}
"Gyroscope.Resolution" "None" {[NaN]} {[NaN]}
"Gyroscope.ConstantBias" "None" {[NaN]} {[NaN]}
"Gyroscope.NoiseDensity" "None" {[NaN]} {[NaN]}
"Gyroscope.BiasInstability" "None" {[NaN]} {[NaN]}
"Gyroscope.RandomWalk" "None" {[NaN]} {[NaN]}
"Gyroscope.TemperatureBias" "None" {[NaN]} {[NaN]}
"Gyroscope.TemperatureScaleFactor" "None" {[NaN]} {[NaN]}
⋮
Specify the perturbation for the NoiseDensity property of the accelerometer as a uniform distribution.
perturbations(imu,'Accelerometer.NoiseDensity', ... 'Uniform',1e-5,1e-3);
Specify the perturbation for the RandomWalk property of the gyroscope as a truncated normal distribution.
perts = perturbations(imu,'Gyroscope.RandomWalk', ... 'TruncatedNormal',2,1e-5,0,Inf);
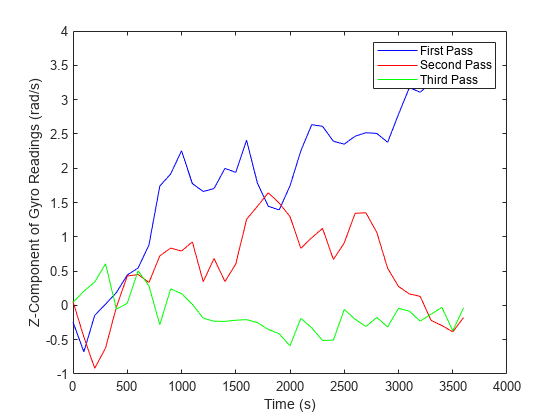
Load prerecorded IMU data.
load imuSensorData.mat
numSamples = size(orientations);Simulate the imuSensor three times with different perturbation realizations.
rng(2021); % For repeatable results numRuns = 3; colors = ['b' 'r' 'g']; for idx = 1:numRuns % Clone IMU to maintain original values imuCopy = clone(imu); % Perturb noise values offsets = perturb(imuCopy); % Obtain the measurements [accelReadings,gyroReadings] = imuCopy(accelerations,angularVelocities,orientations); % Plot the results plot(times,gyroReadings(:,3),colors(idx)); hold on; end xlabel('Time (s)') ylabel('Z-Component of Gyro Readings (rad/s)') legend("First Pass","Second Pass","Third Pass"); hold off
Input Arguments
Output Arguments
More About
You can specify the distribution for the perturbation applied to a specific property.
Selection distribution — The function defines the perturbation offset as one of the specified values with the associated probability. For example, if you specify the values as
[1 2]and specify the probabilities as[0.7 0.3], then theperturbfunction adds an offset value of1to the property with a probability of0.7and add an offset value of2to the property with a probability of0.3. Use selection distribution when you only want to perturb the property with a number of discrete values.Normal distribution — The function defines the perturbation offset as a value drawn from a normal distribution with the specified mean and standard deviation (or covariance). Normal distribution is the most commonly used distribution since it mimics the natural perturbation of parameters in most cases.
Truncated normal distribution — The function defines the perturbation offset as a value drawn from a truncated normal distribution with the specified mean, standard deviation (or covariance), lower limit, and upper limit. Different from the normal distribution, the values drawn from a truncated normal distribution are truncated by the lower and upper limit. Use truncated normal distribution when you want to apply a normal distribution, but the valid values of the property are confined in an interval.
Uniform distribution — The function defines the perturbation offset as a value drawn from a uniform distribution with the specified minimum and maximum values. All the values in the interval (specified by the minimum and maximum values) have the same probability of realization.
Custom distribution — Customize your own perturbation function. The function must have this syntax:
whereoffset = myfun(propVal)
propValis the value of thepropertyandoffsetis the perturbation offset for the property.
This figure shows probability density functions for a normal distribution, a truncated normal distribution, and a uniform distribution, respectively.

Version History
Introduced in R2020b