tune
Tune imufilter parameters to reduce estimation error
Description
tune(
adjusts the properties of the filter,sensorData,groundTruth)imufilter filter object,
filter, to reduce the root-mean-squared (RMS) quaternion distance
error between the fused sensor data and the ground truth. The function fuses the sensor data
to estimate the orientation, which is compared to the orientation in the ground truth. The
function uses the property values in the filter as the initial estimate for the optimization
algorithm.
tune(___, specifies the
tuning configuration based on a config)tunerconfig object,
config.
Examples
Load recorded sensor data and ground truth data.
ld = load("imufilterTuneData.mat"); qTrue = ld.groundTruth.Orientation; % true orientation
Create an imufilter object and fuse the filter with the sensor data.
fuse = imufilter;
qEstUntuned = fuse(ld.sensorData.Accelerometer, ...
ld.sensorData.Gyroscope);Create a tunerconfig object and tune the imufilter to improve the orientation estimate.
cfg = tunerconfig("imufilter",ObjectiveLimit=0.03);
reset(fuse)
tune(fuse,ld.sensorData,ld.groundTruth,cfg); Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 0.0857
1 GyroscopeNoise 0.0855
1 GyroscopeDriftNoise 0.0855
1 LinearAccelerationNoise 0.0851
1 LinearAccelerationDecayFactor 0.0844
2 AccelerometerNoise 0.0844
2 GyroscopeNoise 0.0842
2 GyroscopeDriftNoise 0.0842
2 LinearAccelerationNoise 0.0840
2 LinearAccelerationDecayFactor 0.0836
3 AccelerometerNoise 0.0836
3 GyroscopeNoise 0.0834
3 GyroscopeDriftNoise 0.0834
3 LinearAccelerationNoise 0.0834
3 LinearAccelerationDecayFactor 0.0831
4 AccelerometerNoise 0.0831
4 GyroscopeNoise 0.0829
4 GyroscopeDriftNoise 0.0829
4 LinearAccelerationNoise 0.0829
4 LinearAccelerationDecayFactor 0.0827
5 AccelerometerNoise 0.0827
5 GyroscopeNoise 0.0824
5 GyroscopeDriftNoise 0.0824
5 LinearAccelerationNoise 0.0824
5 LinearAccelerationDecayFactor 0.0822
6 AccelerometerNoise 0.0822
6 GyroscopeNoise 0.0819
6 GyroscopeDriftNoise 0.0819
6 LinearAccelerationNoise 0.0819
6 LinearAccelerationDecayFactor 0.0818
7 AccelerometerNoise 0.0818
7 GyroscopeNoise 0.0814
7 GyroscopeDriftNoise 0.0814
7 LinearAccelerationNoise 0.0814
7 LinearAccelerationDecayFactor 0.0813
8 AccelerometerNoise 0.0813
8 GyroscopeNoise 0.0808
8 GyroscopeDriftNoise 0.0808
8 LinearAccelerationNoise 0.0808
8 LinearAccelerationDecayFactor 0.0807
9 AccelerometerNoise 0.0807
9 GyroscopeNoise 0.0802
9 GyroscopeDriftNoise 0.0802
9 LinearAccelerationNoise 0.0802
9 LinearAccelerationDecayFactor 0.0801
10 AccelerometerNoise 0.0801
10 GyroscopeNoise 0.0794
10 GyroscopeDriftNoise 0.0794
10 LinearAccelerationNoise 0.0794
10 LinearAccelerationDecayFactor 0.0794
11 AccelerometerNoise 0.0794
11 GyroscopeNoise 0.0785
11 GyroscopeDriftNoise 0.0785
11 LinearAccelerationNoise 0.0785
11 LinearAccelerationDecayFactor 0.0785
12 AccelerometerNoise 0.0785
12 GyroscopeNoise 0.0775
12 GyroscopeDriftNoise 0.0775
12 LinearAccelerationNoise 0.0775
12 LinearAccelerationDecayFactor 0.0774
13 AccelerometerNoise 0.0774
13 GyroscopeNoise 0.0762
13 GyroscopeDriftNoise 0.0762
13 LinearAccelerationNoise 0.0762
13 LinearAccelerationDecayFactor 0.0761
14 AccelerometerNoise 0.0761
14 GyroscopeNoise 0.0746
14 GyroscopeDriftNoise 0.0746
14 LinearAccelerationNoise 0.0746
14 LinearAccelerationDecayFactor 0.0745
15 AccelerometerNoise 0.0745
15 GyroscopeNoise 0.0727
15 GyroscopeDriftNoise 0.0727
15 LinearAccelerationNoise 0.0727
15 LinearAccelerationDecayFactor 0.0726
16 AccelerometerNoise 0.0726
16 GyroscopeNoise 0.0706
16 GyroscopeDriftNoise 0.0706
16 LinearAccelerationNoise 0.0705
16 LinearAccelerationDecayFactor 0.0705
17 AccelerometerNoise 0.0705
17 GyroscopeNoise 0.0684
17 GyroscopeDriftNoise 0.0684
17 LinearAccelerationNoise 0.0683
17 LinearAccelerationDecayFactor 0.0683
18 AccelerometerNoise 0.0683
18 GyroscopeNoise 0.0662
18 GyroscopeDriftNoise 0.0662
18 LinearAccelerationNoise 0.0662
18 LinearAccelerationDecayFactor 0.0662
19 AccelerometerNoise 0.0662
19 GyroscopeNoise 0.0644
19 GyroscopeDriftNoise 0.0644
19 LinearAccelerationNoise 0.0644
19 LinearAccelerationDecayFactor 0.0644
20 AccelerometerNoise 0.0644
20 GyroscopeNoise 0.0630
20 GyroscopeDriftNoise 0.0630
20 LinearAccelerationNoise 0.0630
20 LinearAccelerationDecayFactor 0.0630
Fuse the sensor data again using the tuned filter.
qEstTuned = fuse(ld.sensorData.Accelerometer, ...
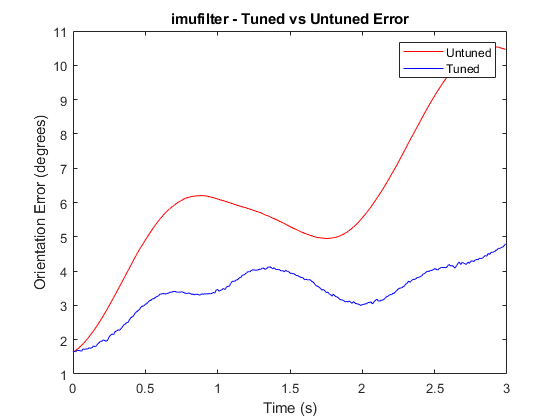
ld.sensorData.Gyroscope);Compare the tuned and untuned filter RMS error performances.
dUntuned = rad2deg(dist(qEstUntuned,qTrue)); dTuned = rad2deg(dist(qEstTuned,qTrue)); rmsUntuned = sqrt(mean(dUntuned.^2))
rmsUntuned = 4.9108
rmsTuned = sqrt(mean(dTuned.^2))
rmsTuned = 3.6116
Visualize the results.
N = numel(dUntuned); t = (0:N-1)./ fuse.SampleRate; plot(t,dUntuned,"r",t,dTuned,"b"); legend("Untuned","Tuned"); title("imufilter - Tuned vs Untuned Error") xlabel("Time (s)"); ylabel("Orientation Error (degrees)");
Input Arguments
References
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Version History
Introduced in R2020b