imufilter
Orientation from accelerometer and gyroscope readings
Description
The imufilter
System object™ fuses accelerometer and gyroscope sensor data to estimate device
orientation.
To estimate device orientation:
Create the
imufilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
The imufilter object assumes that the initial orientation of the
device aligns with the parent reference frame (NED or ENU) that you specify using the
RFimufilter. To align the
logged orientation and imufilter orientation, see the "Align the Logged
Orientation and imufilter Orientation" section of Logged Sensor Data Alignment for Orientation Estimation.
Creation
Description
FUSE = imufilterFUSE, for fusion of accelerometer and gyroscope data to
estimate device orientation. The filter uses a nine-element state vector to track error in
the orientation estimate, the gyroscope bias estimate, and the linear acceleration
estimate.
FUSE = imufilter('ReferenceFrame',RF)imufilter filter System object that fuses accelerometer and gyroscope data to estimate device orientation
relative to the reference frame RF.
FUSE = imufilter(___,Name=Value)
Example: FUSE = imufilter('SampleRate',200,'GyroscopeNoise',1e-6)
creates a System object, FUSE, with a 200 Hz sample rate and gyroscope noise set
to 1e-6 radians per second squared.
Input Arguments
Properties
Usage
Description
[
fuses accelerometer and gyroscope readings to compute orientation and angular velocity
measurements. The algorithm assumes that the device is stationary before the first
call.orientation,angularVelocity,residualData] = FUSE(accelReadings,gyroReadings)
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Load the rpy_9axis file, which contains recorded accelerometer, gyroscope, and magnetometer sensor data from a device oscillating in pitch (around y-axis), then yaw (around z-axis), and then roll (around x-axis). The file also contains the sample rate of the recording.
load 'rpy_9axis.mat' sensorData Fs accelerometerReadings = sensorData.Acceleration; gyroscopeReadings = sensorData.AngularVelocity;
Create an imufilter System object™ with sample rate set to the sample rate of the sensor data. Specify a decimation factor of two to reduce the computational cost of the algorithm.
decim = 2; fuse = imufilter('SampleRate',Fs,'DecimationFactor',decim);
Pass the accelerometer readings and gyroscope readings to the imufilter object, fuse, to output an estimate of the sensor body orientation over time. By default, the orientation is output as a vector of quaternions.
q = fuse(accelerometerReadings,gyroscopeReadings);
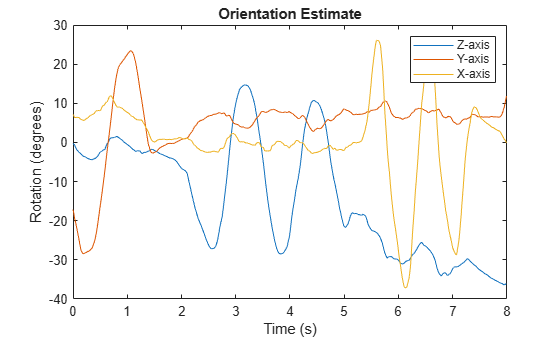
Orientation is defined by the angular displacement required to rotate a parent coordinate system to a child coordinate system. Plot the orientation in Euler angles in degrees over time.
imufilter fusion correctly estimates the change in orientation from an assumed north-facing initial orientation. However, the device's x-axis was pointing southward when recorded. To correctly estimate the orientation relative to the true initial orientation or relative to NED, use ahrsfilter.
time = (0:decim:size(accelerometerReadings,1)-1)/Fs; plot(time,eulerd(q,'ZYX','frame')) title('Orientation Estimate') legend('Z-axis', 'Y-axis', 'X-axis') xlabel('Time (s)') ylabel('Rotation (degrees)')
Model a tilting IMU that contains an accelerometer and gyroscope using the imuSensor System object™. Use ideal and realistic models to compare the results of orientation tracking using the imufilter System object.
Load a struct describing ground-truth motion and a sample rate. The motion struct describes sequential rotations:
yaw: 120 degrees over two seconds
pitch: 60 degrees over one second
roll: 30 degrees over one-half second
roll: -30 degrees over one-half second
pitch: -60 degrees over one second
yaw: -120 degrees over two seconds
In the last stage, the motion struct combines the 1st, 2nd, and 3rd rotations into a single-axis rotation. The acceleration, angular velocity, and orientation are defined in the local NED coordinate system.
load y120p60r30.mat motion fs accNED = motion.Acceleration; angVelNED = motion.AngularVelocity; orientationNED = motion.Orientation; numSamples = size(motion.Orientation,1); t = (0:(numSamples-1)).'/fs;
Create an ideal IMU sensor object and a default IMU filter object.
IMU = imuSensor('accel-gyro','SampleRate',fs); aFilter = imufilter('SampleRate',fs);
In a loop:
Simulate IMU output by feeding the ground-truth motion to the IMU sensor object.
Filter the IMU output using the default IMU filter object.
orientation = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientation(i) = aFilter(accelBody,gyroBody); end release(aFilter)
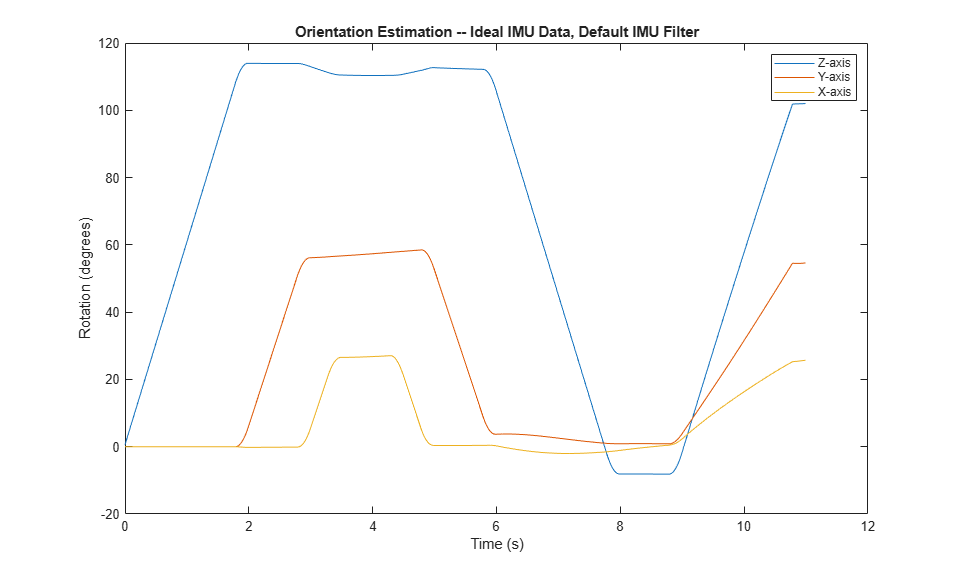
Plot the orientation over time.
figure(1) plot(t,eulerd(orientation,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Ideal IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')
Modify properties of your imuSensor to model real-world sensors. Run the loop again and plot the orientation estimate over time.
IMU.Accelerometer = accelparams( ... 'MeasurementRange',19.62, ... 'Resolution',0.00059875, ... 'ConstantBias',0.4905, ... 'AxesMisalignment',2, ... 'NoiseDensity',0.003924, ... 'BiasInstability',0, ... 'TemperatureBias', [0.34335 0.34335 0.5886], ... 'TemperatureScaleFactor',0.02); IMU.Gyroscope = gyroparams( ... 'MeasurementRange',4.3633, ... 'Resolution',0.00013323, ... 'AxesMisalignment',2, ... 'NoiseDensity',8.7266e-05, ... 'TemperatureBias',0.34907, ... 'TemperatureScaleFactor',0.02, ... 'AccelerationBias',0.00017809, ... 'ConstantBias',[0.3491,0.5,0]); orientationDefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationDefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(2) plot(t,eulerd(orientationDefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')
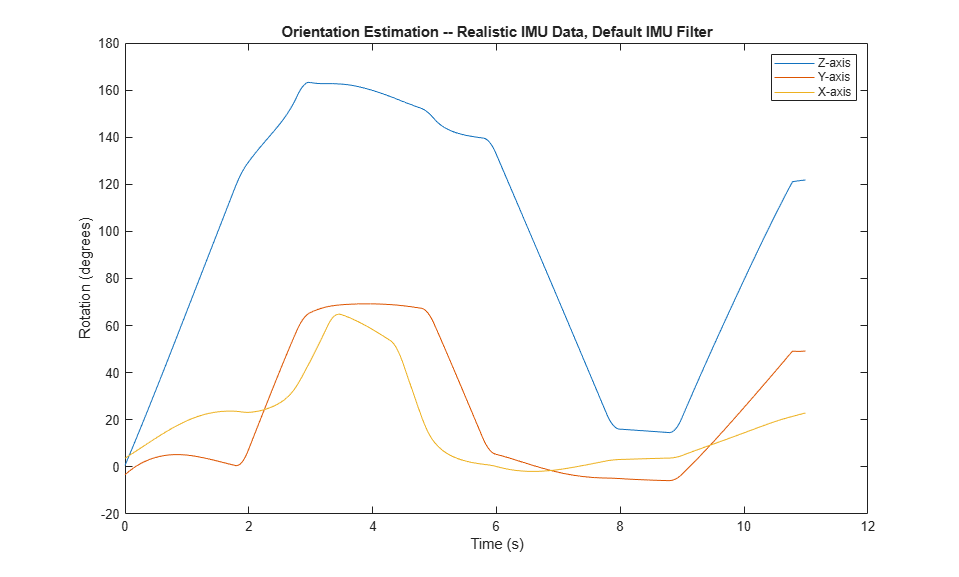
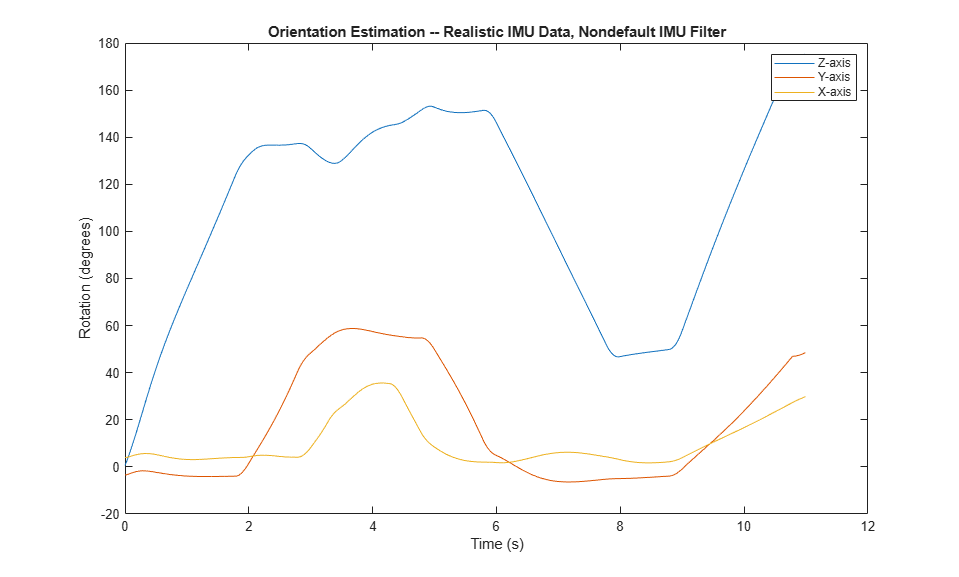
The ability of the imufilter to track the ground-truth data is significantly reduced when modeling a realistic IMU. To improve performance, modify properties of your imufilter object. These values were determined empirically. Run the loop again and plot the orientation estimate over time.
aFilter.GyroscopeNoise = 7.6154e-7; aFilter.AccelerometerNoise = 0.0015398; aFilter.GyroscopeDriftNoise = 3.0462e-12; aFilter.LinearAccelerationNoise = 0.00096236; aFilter.InitialProcessNoise = aFilter.InitialProcessNoise*10; orientationNondefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationNondefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(3) plot(t,eulerd(orientationNondefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Nondefault IMU Filter') legend('Z-axis','Y-axis','X-axis')
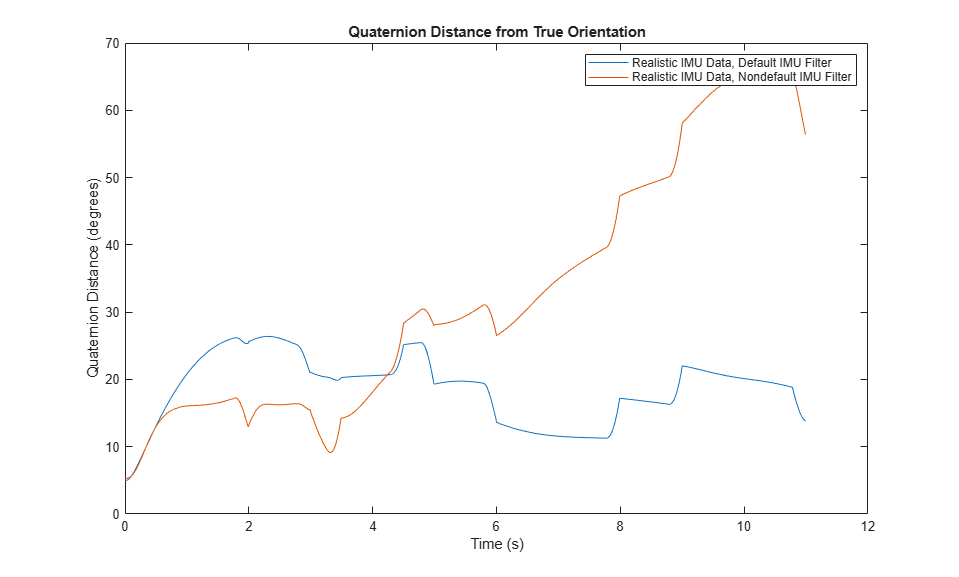
To quantify the improved performance of the modified imufilter, plot the quaternion distance between the ground-truth motion and the orientation as returned by the imufilter with default and nondefault properties.
qDistDefault = rad2deg(dist(orientationNED,orientationDefault)); qDistNondefault = rad2deg(dist(orientationNED,orientationNondefault)); figure(4) plot(t,[qDistDefault,qDistNondefault]) title('Quaternion Distance from True Orientation') legend('Realistic IMU Data, Default IMU Filter', ... 'Realistic IMU Data, Nondefault IMU Filter') xlabel('Time (s)') ylabel('Quaternion Distance (degrees)')


This example shows how to remove gyroscope bias from an IMU using imufilter.
Use kinematicTrajectory to create a trajectory with two parts. The first part has a constant angular velocity about the y- and z-axes. The second part has a varying angular velocity in all three axes.
duration = 60*8; fs = 20; numSamples = duration * fs; rng('default') % Seed the RNG to reproduce noisy sensor measurements. initialAngVel = [0,0.5,0.25]; finalAngVel = [-0.2,0.6,0.5]; constantAngVel = repmat(initialAngVel,floor(numSamples/2),1); varyingAngVel = [linspace(initialAngVel(1), finalAngVel(1), ceil(numSamples/2)).', ... linspace(initialAngVel(2), finalAngVel(2), ceil(numSamples/2)).', ... linspace(initialAngVel(3), finalAngVel(3), ceil(numSamples/2)).']; angVelBody = [constantAngVel; varyingAngVel]; accBody = zeros(numSamples,3); traj = kinematicTrajectory('SampleRate',fs); [~,qNED,~,accNED,angVelNED] = traj(accBody,angVelBody);
Create an imuSensor System object™, IMU, with a nonideal gyroscope. Call IMU with the ground-truth acceleration, angular velocity, and orientation.
IMU = imuSensor('accel-gyro', ... 'Gyroscope',gyroparams('RandomWalk',0.003,'ConstantBias',0.3), ... 'SampleRate',fs); [accelReadings, gyroReadingsBody] = IMU(accNED,angVelNED,qNED);
Create an imufilter System object, fuse. Call fuse with the modeled accelerometer readings and gyroscope readings.
fuse = imufilter('SampleRate',fs, 'GyroscopeDriftNoise', 1e-6); [~,angVelBodyRecovered] = fuse(accelReadings,gyroReadingsBody);
Plot the ground-truth angular velocity, the gyroscope readings, and the recovered angular velocity for each axis.
The angular velocity returned from the imufilter compensates for the effect of the gyroscope bias over time and converges to the true angular velocity.
time = (0:numSamples-1)'/fs; figure(1) plot(time,angVelBody(:,1), ... time,gyroReadingsBody(:,1), ... time,angVelBodyRecovered(:,1)) title('X-axis') legend('True Angular Velocity', ... 'Gyroscope Readings', ... 'Recovered Angular Velocity') ylabel('Angular Velocity (rad/s)')

figure(2) plot(time,angVelBody(:,2), ... time,gyroReadingsBody(:,2), ... time,angVelBodyRecovered(:,2)) title('Y-axis') ylabel('Angular Velocity (rad/s)')

figure(3) plot(time,angVelBody(:,3), ... time,gyroReadingsBody(:,3), ... time,angVelBodyRecovered(:,3)) title('Z-axis') ylabel('Angular Velocity (rad/s)') xlabel('Time (s)')

Algorithms
Note: The following algorithm only applies to an NED reference frame.
The imufilter uses the six-axis Kalman filter structure described in [1]. The algorithm attempts to
track the errors in orientation, gyroscope offset, and linear acceleration to output the final
orientation and angular velocity. Instead of tracking the orientation directly, the indirect
Kalman filter models the error process, x, with a recursive update:
where xk is a 9-by-1 vector consisting of:
θk –– 3-by-1 orientation error vector, in radians, at time k
bk –– 3-by-1 gyroscope zero angular rate bias vector, in radians per second, at time k
ak –– 3-by-1 acceleration error vector measured in the sensor frame, in g, at time k
wk –– 9-by-1 additive noise vector
Fk –– state transition model
Because xk is defined as the error process, the a priori estimate is always zero, and therefore the state transition model, Fk, is zero. This insight results in the following reduction of the standard Kalman equations:
Standard Kalman equations:
Kalman equations used in this algorithm:
where
xk− –– predicted (a priori) state estimate; the error process
Pk− –– predicted (a priori) estimate covariance
yk –– innovation
Sk –– innovation covariance
Kk –– Kalman gain
xk+ –– updated (a posteriori) state estimate
Pk+ –– updated (a posteriori) estimate covariance
k represents the iteration, the superscript + represents an a posteriori estimate, and the superscript − represents an a priori estimate.
The graphic and following steps describe a single frame-based iteration through the algorithm.
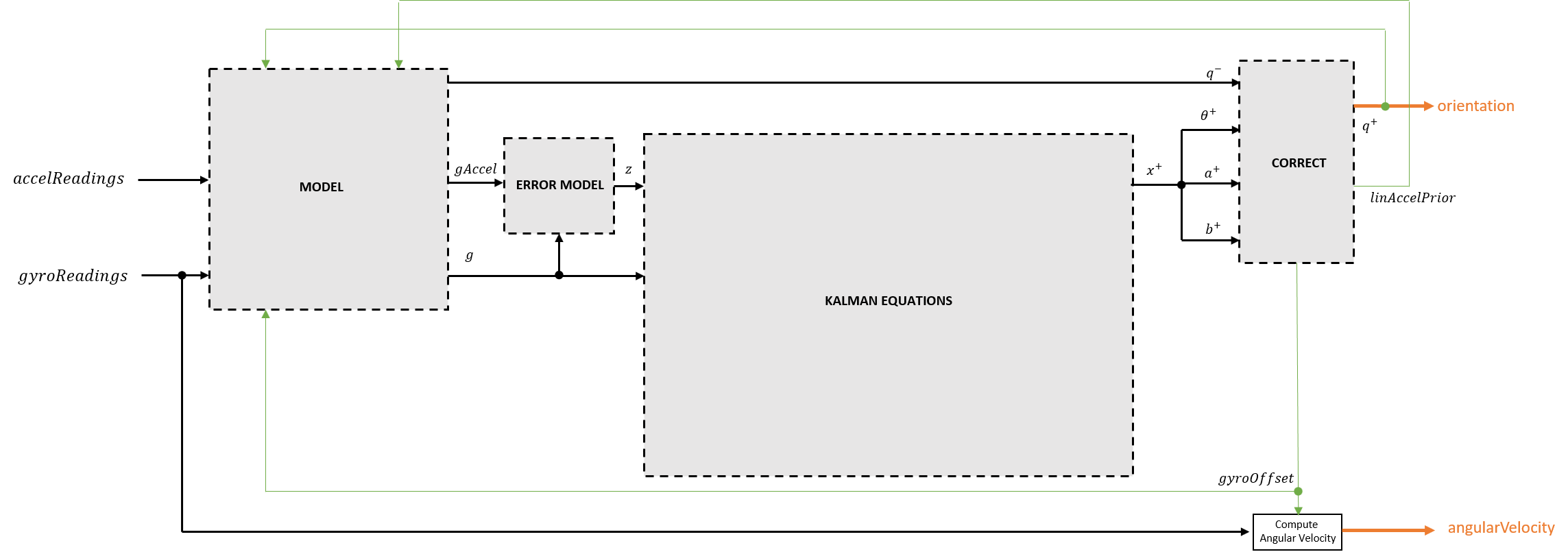
Before the first iteration, the accelReadings and
gyroReadings inputs are chunked into 1-by-3 frames and
DecimationFactor-by-3 frames, respectively. The algorithm uses the most
current accelerometer readings corresponding to the chunk of gyroscope readings.
Step through the algorithm for an explanation of each stage of the detailed overview.

The algorithm models acceleration and angular change as linear processes.

The orientation for the current frame is predicted by first estimating the angular change from the previous frame:
where N is the decimation factor specified by the
DecimationFactor property, and fs is the sample
rate specified by the SampleRate property. The brackets indicate the
matrix dimensions.
The angular change is converted into quaternions using the rotvec
quaternion
construction syntax:
The previous orientation estimate is updated by rotating it by ΔQ:
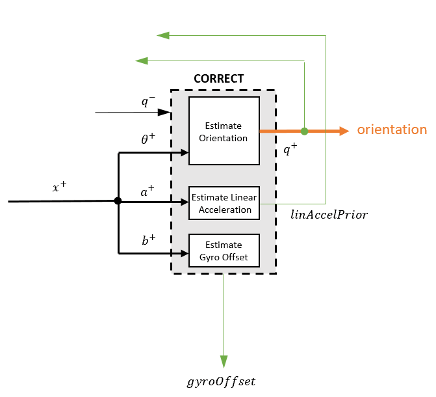
During the first iteration, the orientation estimate,
q−, is initialized by ecompass with
an assumption that the x-axis points north.
The gravity vector is interpreted as the third column of the quaternion, q−, in rotation matrix form. This vector is in meters per second squared (m/s²):
See ecompass for an explanation of
why the third column of rPrior can be interpreted as the gravity
vector.
A second gravity vector estimation is made by subtracting the decayed linear acceleration estimate of the previous iteration from the accelerometer readings. Both the accelerometer readings and the resulting gravity vector are in meters per second squared (m/s²):
The error model is the difference between the gravity estimate from the accelerometer readings and the gravity estimate from the gyroscope readings: .

The Kalman equations use the gravity estimate derived from the gyroscope readings, g, and the observation of the error process, z, to update the Kalman gain and intermediary covariance matrices. The Kalman gain is applied to the error signal, z, to output an a posteriori error estimate, x+.

The observation model maps the 1-by-3 observed state, g, into the 3-by-9 true state, H.
The observation model is constructed as:
where gx,
gy, and
gz are the x-,
y-, and z-elements of the gravity vector estimated
from the orientation, respectively. κ is a constant determined by the SampleRate
and DecimationFactor
properties: κ =
DecimationFactor/SampleRate.
See sections 7.3 and 7.4 of [1] for a derivation of the observation model.
The innovation covariance is a 3-by-3 matrix used to track the variability in the measurements. The innovation covariance matrix is calculated as:
where
H is the observation model matrix
P− is the predicted (a priori) estimate of the covariance of the observation model calculated in the previous iteration
R is the covariance of the observation model noise, calculated as:
The following properties define the observation model noise variance:
κ –– (DecimationFactor/SampleRate)2
β –– GyroscopeDriftNoise
η –– GyroscopeNoise
λ –– AccelerometerNoise
The error estimate covariance is a 9-by-9 matrix used to track the variability in the state.
The error estimate covariance matrix is updated as:
where K is the Kalman gain, H is the measurement matrix, and P− is the error estimate covariance calculated during the previous iteration.
The error estimate covariance is a 9-by-9 matrix used to track the variability in the state. The a priori error estimate covariance, P−, is set to the process noise covariance, Q, determined during the previous iteration. Q is calculated as a function of the a posteriori error estimate covariance, P+. When calculating Q, the cross-correlation terms are assumed to be negligible compared to the autocorrelation terms, and are set to zero:
where
P+ –– is the updated (a posteriori) error estimate covariance
β –– GyroscopeDriftNoise
η –– GyroscopeNoise
See section 10.1 of [1] for a derivation of the terms of the process error matrix.
The Kalman gain matrix is a 9-by-3 matrix used to weight the innovation. In this algorithm, the innovation is interpreted as the error process, z.
The Kalman gain matrix is constructed as:
where
P- –– predicted error covariance
H –– observation model
S –– innovation covariance
The a posterior error estimate is determined by combining the Kalman gain matrix with the error in the gravity vector estimations:
The orientation estimate is updated by multiplying the previous estimation by the error:
The linear acceleration estimation is updated by decaying the linear acceleration estimation from the previous iteration and subtracting the error:
where
The gyroscope offset estimation is updated by subtracting the gyroscope offset error from the gyroscope offset from the previous iteration:
References
[1] Open Source Sensor Fusion. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Roetenberg, D., H.J. Luinge, C.T.M. Baten, and P.H. Veltink. "Compensation of Magnetic Disturbances Improves Inertial and Magnetic Sensing of Human Body Segment Orientation." IEEE Transactions on Neural Systems and Rehabilitation Engineering. Vol. 13. Issue 3, 2005, pp. 395-405.
Extended Capabilities
Version History
Introduced in R2018bSee Also
ecompass | ahrsfilter | imuSensor | gpsSensor | quaternion