iirlp2lp
Transform lowpass IIR filter to different lowpass filter
Syntax
Description
[
transforms lowpass IIR filter to different lowpass filter.num,den] = iirlp2lp(b,a,wo,wt)
The prototype lowpass filter is specified with the numerator and denominator
coefficients, b and a respectively. The
function returns the numerator and denominator coefficients of the transformed
lowpass digital filter.
The function transforms the magnitude response from lowpass to a different lowpass. For more details, see Lowpass IIR Filter to Different Lowpass Filter Transformation.
[
in addition returns the numerator and the denominator coefficients of the allpass
mapping filter.num,den,allpassNum,allpassDen] =
iirlp2lp(b,a,wo,wt)
[
specifies the input prototype lowpass IIR filter as a filter object. The function
returns the target lowpass IIR filter as a filter object. (since R2026a)tfiltObj,allpassNum,allpassDen] =
iirlp2lp(pfiltObj,wo,wt)
Examples
Transform the passband of a lowpass IIR filter by moving the magnitude response from one frequency in the source filter to a new location in the transformed filter.
Input Lowpass IIR Filter
Generate a least P-norm optimal IIR lowpass filter using the iirlpnorm function. Specify a numerator order of 10 and a denominator order of 6. The function returns the coefficients both in the vector form and in the second-order sections (SOS) form. The output argument g specifies the overall gain of the filter when expressed in the second-order sections form.
[b,a,~,sos,g] = iirlpnorm(10,6, ... [0 0.0175 0.02 0.0215 0.025 1], ... [0 0.0175 0.02 0.0215 0.025 1],[1 1 0 0 0 0], ... [1 1 1 1 10 10]);
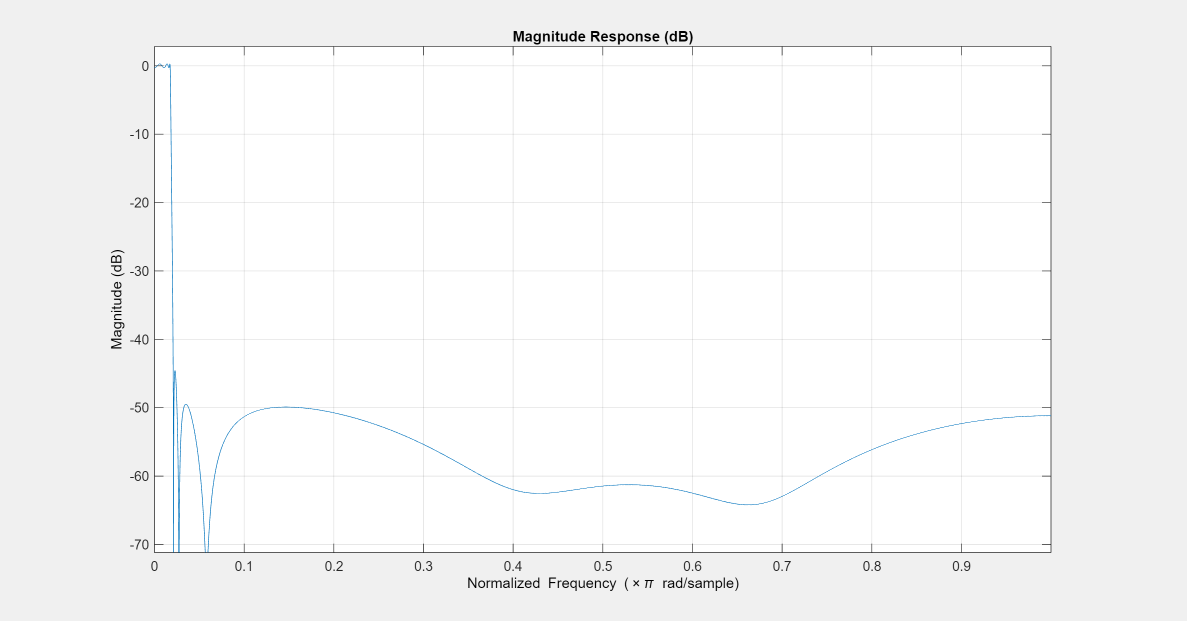
Visualize the magnitude response of the filter.
filterAnalyzer(b,a)
Transform Filter Using iirlp2lp
Transform the passband of the lowpass IIR filter using the iirlp2lp function. Specify the filter as a vector of numerator and denominator coefficients.
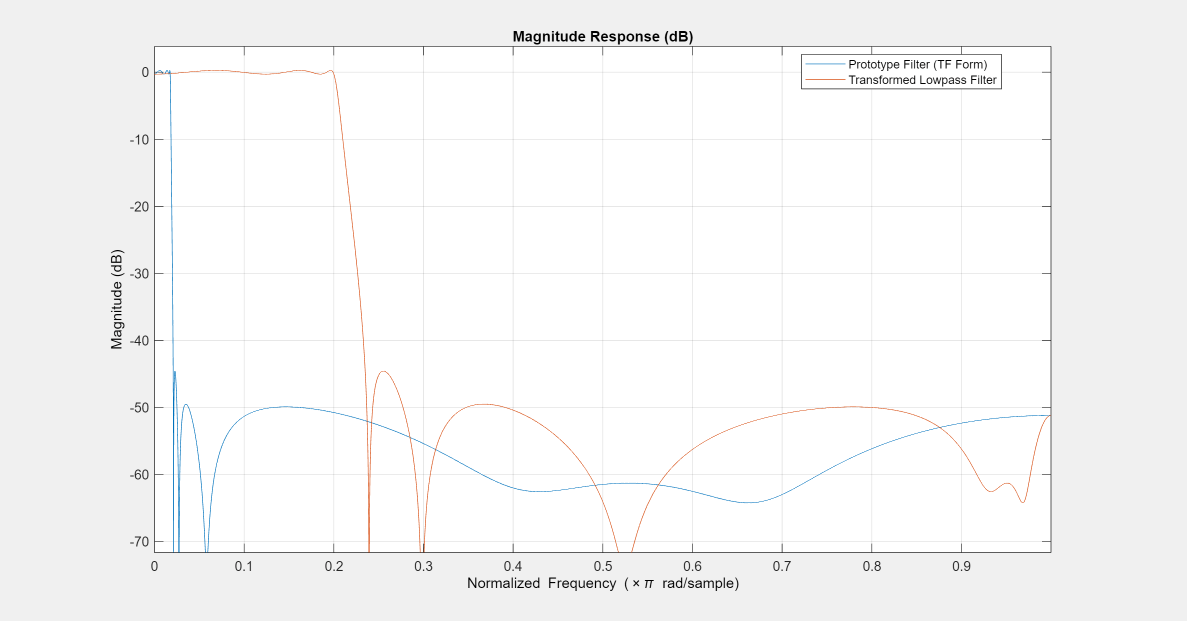
To generate a lowpass filter whose passband extends out to 0.2π rad/sample, select the frequency in the lowpass filter at 0.0175π, the frequency where the passband starts to roll off, and move it to the new location.
Moving the edge of the passband from 0.0175π to 0.2π results in a new lowpass filter whose peak response in-band is the same as in the original filter, with the same ripple and the same absolute magnitude. The rolloff is slightly less steep and the stopband profiles are the same for both filters. The new filter stopband is a "stretched" version of the original, as is the passband of the new filter.
wc = 0.0175; wd = 0.2; [num,den] = iirlp2lp(b,a,wc,wd);
Compare the magnitude response of the filters.
filterAnalyzer(b,a,num,den,... FilterNames=["PrototypeFilter_TFForm","TransformedLowpassFilter"]);
Alternatively, you can also specify the input lowpass IIR filter as a matrix of coefficients. Pass the scaled second-order section coefficient matrices as inputs. Apply the scaling factor g to the first section of the filter.
sosg = sos; sosg(1,1:3) = g*sosg(1,1:3); [numg,deng] = sos2ctf(sosg); [num2,den2] = iirlp2lp(sosg(:,1:3),sosg(:,4:6),wc,wd);
Compare the magnitude response of the filters.
filterAnalyzer(numg,deng,num2,den2,... FilterNames=["PrototypeFilter_MatrixForm","TransformedLowpassFilter"]);

Since R2026a
Design an eighth-order lowpass IIR filter with a passband frequency of 0.4 and a stopband frequency of 0.5 using the designfilt function. Setting the Systemobject flag to true with these specifications creates a dsp.SOSFilter object.
pFilt = designfilt("lowpassiir",FilterOrder=8,... PassbandFrequency=0.5,StopbandFrequency=0.6,... Systemobject=true)
pFilt =
dsp.SOSFilter with properties:
Structure: 'Direct form II'
CoefficientSource: 'Property'
Numerator: [4×3 double]
Denominator: [4×3 double]
HasScaleValues: true
ScaleValues: [0.6263 1 1 1 1]
Show all properties
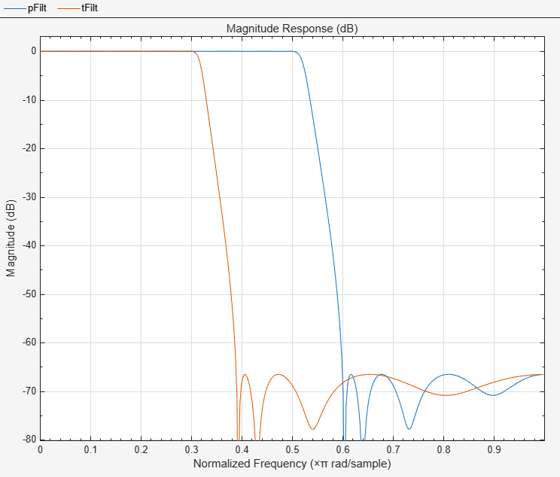
Reduce Passband Frequency to 0.3
Specify the original passband frequency of 0.5 and the target passband frequency of 0.3 as inputs to the iirlp2lp function. The iirlp2lp function transforms the original prototype filter into another lowpass IIR filter of the same order but has different passband and stopband frequencies. The transformed filter is also a dsp.SOSFilter object.
tFilt = iirlp2lp(pFilt,0.5,0.3)
tFilt =
dsp.SOSFilter with properties:
Structure: 'Direct form II transposed'
CoefficientSource: 'Property'
Numerator: [4×3 double]
Denominator: [4×3 double]
HasScaleValues: false
Show all properties
Visualize Filters
Visualize the original filter and the transformed filter using filterAnalyzer.
filterAnalyzer(pFilt,tFilt)
Input Arguments
Output Arguments
More About
References
[1] Nowrouzian, B., and A.G. Constantinides. “Prototype Reference Transfer Function Parameters in the Discrete-Time Frequency Transformations.” In Proceedings of the 33rd Midwest Symposium on Circuits and Systems, 1078–82. Calgary, Alta., Canada: IEEE, 1991. https://doi.org/10.1109/MWSCAS.1990.140912.
[2] Nowrouzian, B., and L.T. Bruton. “Closed-Form Solutions for Discrete-Time Elliptic Transfer Functions.” In [1992] Proceedings of the 35th Midwest Symposium on Circuits and Systems, 784–87. Washington, DC, USA: IEEE, 1992. https://doi.org/10.1109/MWSCAS.1992.271206.
[3] Constantinides, A.G.“Spectral transformations for digital filters.” Proceedings of the IEEE, vol. 117, no. 8: 1585-1590. August 1970.