designMultistageInterpolator
Multistage interpolator design
Syntax
Description
C = designMultistageInterpolator(L)L. In order for C to be multistage,
L must not be a prime number. For details, see Algorithms. The design process can
take a while if L has many factors.
C = designMultistageInterpolator(L,Fs,TW)Fs and a
transition width of TW. Sampling rate in this case refers to the output
sampling rate of the signal after the multistage interpolator.
The multistage interpolator has a cutoff frequency of Fs/2.
C = designMultistageInterpolator(___,Name=Value)
Example: C =
designMultistageInterpolator(48,48000,200,80,NumStages='auto') designs a
multistage interpolator with the least number of multiplications per input sample
(MPIS).
Examples
Design a single-stage interpolator using the designMultirateFIR function and a multistage interpolator using the designMultistageInterpolator function. Determine the efficiency of the two designs using the cost function. The implementation efficiency is characterized by two cost metrics: NumCoefficients and MultiplicationsPerInputSample.
Compute the cost of implementing both designs, and determine which design is more efficient. To make a comparison, design the filters such that their transition width is the same.
Initialization
Choose an interpolation factor of 48, input sample rate of 640 kHz, one-sided bandwidth of 100 kHz, and a stopband attenuation of 90 dB.
L = 48; Fin = 640e3; Astop = 90; BW = 1e5;
Compute the transition width using the following relationship:
Fc = Fin/2; TW = 2*(Fc-BW);
Using the designMultirateFIR Function
Designing the interpolation filter using the designMultirateFIR function yields a single-stage design.
d = designMultirateFIR(InterpolationFactor=L,TransitionWidth=TW/(Fin*L/2),...
StopbandAttenuation=Astop,SystemObject=true)d =
dsp.FIRInterpolator with properties:
InterpolationFactor: 48
NumeratorSource: 'Property'
Numerator: [3.6296e-05 3.9057e-05 4.0435e-05 4.0103e-05 3.7714e-05 3.2899e-05 2.5275e-05 1.4445e-05 0 -1.8471e-05 -4.1383e-05 -6.9142e-05 -1.0215e-04 -1.4078e-04 -1.8540e-04 -2.3633e-04 -2.9386e-04 -3.5824e-04 -4.2966e-04 … ] (1×401 double)
Show all properties
Compute the cost of implementing the interpolator. The interpolation filter requires 376 coefficients and 7 states. The number of multiplications per input sample and additions per input sample are 376 and 329, respectively.
cost(d)
ans = struct with fields:
NumCoefficients: 392
NumStates: 8
MultiplicationsPerInputSample: 392
AdditionsPerInputSample: 345
Using the designMultistageInterpolator Function
Design a multistage interpolator with the same filter specifications as the single-stage design.
By default, the number of stages given by the NumStages argument is set to 'auto', yielding an optimal design that tries to minimize the number of multiplications per input sample.
c = designMultistageInterpolator(L,Fin,TW,Astop)
c =
dsp.FilterCascade with properties:
Stage1: [1×1 dsp.FIRInterpolator]
Stage2: [1×1 dsp.FIRInterpolator]
CloneStages: false
Calling the info function on c shows that the filter is implemented as a cascade of two dsp.FIRInterpolator objects with interpolation factors of 24 and 2, respectively.
Compute the cost of implementing the interpolator.
cost(c)
ans = struct with fields:
NumCoefficients: 184
NumStates: 12
MultiplicationsPerInputSample: 322
AdditionsPerInputSample: 275
The NumCoefficients and the MultiplicationsPerInputSample parameters are lower for the two-stage filter designed by the designMultistageInterpolator function, making it more efficient.
Compare the magnitude response of both designs.
filterAnalyzer(d,c,FilterNames=["Singlestage","Multistage"]);
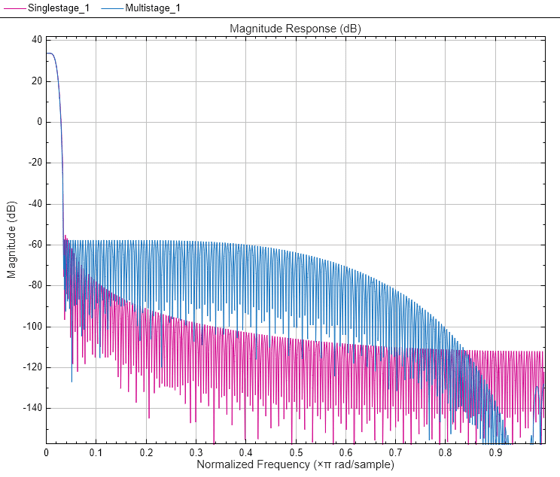
The magnitude response shows that the transition width of both the filters is the same, making the filters comparable. The cost function shows that implementing the multistage design is more efficient compared to implementing the single-stage design.
Using the 'design' Option in the designMultistageInterpolator Function
The filter can be made even more efficient by setting the 'CostMethod' argument of the designMultistageInterpolator function to 'design'. By default, this argument is set to 'estimate'.
In the 'design' mode, the function designs each stage and computes the filter order. This yields an optimal design compared to the 'estimate' mode, where the function estimates the filter order for each stage and designs the filter based on the estimate.
Note that the 'design' option can take much longer compared to the 'estimate' option.
cOptimal = designMultistageInterpolator(L,Fin,TW,Astop,CostMethod='design')cOptimal =
dsp.FilterCascade with properties:
Stage1: [1×1 dsp.FIRInterpolator]
Stage2: [1×1 dsp.FIRInterpolator]
Stage3: [1×1 dsp.FIRInterpolator]
CloneStages: false
cost(cOptimal)
ans = struct with fields:
NumCoefficients: 74
NumStates: 17
MultiplicationsPerInputSample: 296
AdditionsPerInputSample: 249
Design an interpolator with an overall interpolation factor of 24 using the designMultistageInterpolator function. Design the filter in two configurations:
Two-stage configuration -
NumStagesis set to 2.Auto configuration -
NumStagesis set to'auto'. This configuration designs a filter with the lowest number of multiplications per input sample.
Compare the cost of implementing both the configurations.
Initialization
Choose an interpolation factor of 24, input sample rate of 250 Hz, stopband attenuation of 90 dB, and a transition width of 0.03(FsL)/2.
L = 24; Fs = 250; Astop = 90; TW = 0.03*Fs*L/2;
Design the Filter
Design the two filters using the designMultistageInterpolator function.
cAuto = designMultistageInterpolator(L,Fs,TW,Astop,NumStages="auto")cAuto =
dsp.FilterCascade with properties:
Stage1: [1×1 dsp.FIRInterpolator]
Stage2: [1×1 dsp.FIRInterpolator]
Stage3: [1×1 dsp.FIRInterpolator]
CloneStages: false
cTwo = designMultistageInterpolator(L,Fs,TW,Astop,NumStages=2)
cTwo =
dsp.FilterCascade with properties:
Stage1: [1×1 dsp.FIRInterpolator]
Stage2: [1×1 dsp.FIRInterpolator]
CloneStages: false
View the filter information using the info function. The 'auto' configuration designs a cascade of three FIR interpolators with interpolation factors 4, 3, and 2, respectively. The two-stage configuration designs a cascade of two FIR interpolators with interpolation factors 6 and 4, respectively.
Compare the Cost
Compare the cost of implementing the two designs using the cost function.
cost(cAuto)
ans = struct with fields:
NumCoefficients: 70
NumStates: 28
MultiplicationsPerInputSample: 190
AdditionsPerInputSample: 167
cost(cTwo)
ans = struct with fields:
NumCoefficients: 98
NumStates: 22
MultiplicationsPerInputSample: 208
AdditionsPerInputSample: 185
The 'auto' configuration interpolation filter yields a three-stage design that out-performs the two-stage design in terms of NumCoefficients and MultiplicationsPerInputSample metrics.
The filters in the multistage design satisfy the following conditions:
The combined response must meet or exceed the given design specifications.
The combined interpolation must equal the overall interpolation required.
For an overall interpolation factor of 50, there are several combinations of individual stages.
To obtain a design with the least number of total coefficients, set the MinTotalCoeffs argument to true.
Astop = 80; L = 50; FsIn = 120; TW = 0.03*FsIn*L/2; cMinCoeffs = designMultistageInterpolator(L,FsIn,TW,Astop,MinTotalCoeffs=true)
cMinCoeffs =
dsp.FilterCascade with properties:
Stage1: [1×1 dsp.FIRInterpolator]
Stage2: [1×1 dsp.FIRInterpolator]
Stage3: [1×1 dsp.FIRInterpolator]
CloneStages: false
cost(cMinCoeffs)
ans = struct with fields:
NumCoefficients: 58
NumStates: 18
MultiplicationsPerInputSample: 306
AdditionsPerInputSample: 257
To obtain the design with the lowest number of multiplications per input sample, set NumStages to 'auto'.
cMinMulti = designMultistageInterpolator(L,FsIn,TW,Astop,NumStages='auto')cMinMulti =
dsp.FilterCascade with properties:
Stage1: [1×1 dsp.FIRInterpolator]
Stage2: [1×1 dsp.FIRInterpolator]
CloneStages: false
cost(cMinMulti)
ans = struct with fields:
NumCoefficients: 156
NumStates: 9
MultiplicationsPerInputSample: 252
AdditionsPerInputSample: 203
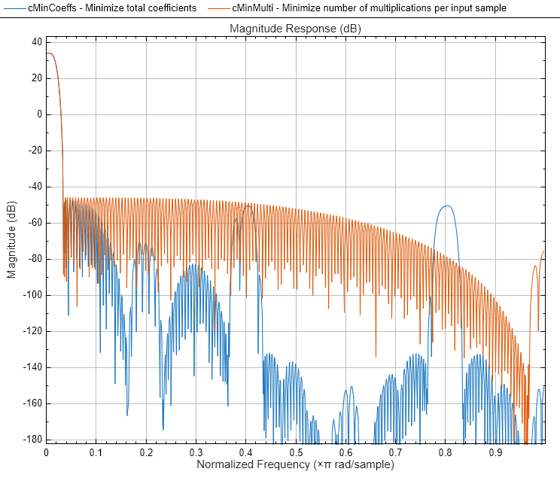
Compare the magnitude response of both the filters. Both filters have the same transition-band behavior and a stopband attenuation that is below 80 dB.
hvft = filterAnalyzer(cMinCoeffs,cMinMulti); setLegendStrings(hvft,["Minimize total coefficients",... "Minimize number of multiplications per input sample"])
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The overall interpolation factor is split into smaller factors with each factor being the interpolation factor of the corresponding individual stage. The combined interpolation of all the individual stages must equal the overall interpolation. The combined response must meet or exceed the given design specifications.
The function determines the number of interpolator stages through the
NumStages argument. The sequence of stages is determined based on the
implementation cost. By default, NumStages is set to
'auto', resulting in a sequence that gives the lowest number of MPIS.
When multiple configurations result in the same lowest MPIS within the tolerance specified,
the configuration that yields the lowest number of coefficients overall is chosen. If
MinTotalCoeffs is set to true, the function
determines the sequence that requires the lowest number of total coefficients.
By default, the CostMethod is set to 'estimate'.
In this mode, the function estimates the filter order required for each stage and designs the
filter based on the estimate. This method is faster but can lead to suboptimal designs. For an
optimal design, set CostMethod to 'design'. In this
mode, the function designs each stage and computes the filter order.