trajectory
Create actor or vehicle trajectory in driving scenario
Syntax
Description
The trajectory function creates a trajectory based on
either the speed values or arrival times of an actor at each waypoint. By default, the
function creates a trajectory for a vehicle whose steering location is at its rear axle.
To create a trajectory for a vehicle whose steering location is at its front axle, use
the ReferenceSteerPosition name-value argument.
Trajectory from Actor Speed Information
trajectory(
creates a trajectory for an actor or vehicle, ac,waypoints)ac, from a
set of waypoints.
Note
The trajectory function generates trajectories that have
discontinuities in acceleration between waypoints, resulting in high
amounts of jerk. To generate a smooth, jerk-limited trajectory, use the
smoothTrajectory function instead.
trajectory(___,
specifies options using one or more name-value arguments in addition to any
combination of arguments from the previous syntaxes. For example,
Name=Value)Course=course specifies the course angle
course, which defines the steering direction of the actor
or vehicle at each waypoint.
Trajectory from Actor Arrival Times
Since R2024b
trajectory(
creates a trajectory for an actor or vehicle, ac,waypoints,TimeOfArrival=timeOfArrival)ac, from a
set of waypoints, waypoints, using the arrival time of the
actor at each waypoint timeOfArrival.
trajectory(
specifies options using one or more name-value arguments. For example,
ac,waypoints,TimeOfArrival=timeOfArrival,Name=Value)MotionDirection=motionDirection specifies the direction
motionDirection for the actor to move at each
waypoint.
Examples
Create a driving scenario and add a curved two-lane road to it.
scenario = drivingScenario('SampleTime',0.05); roadcenters = [5 0; 30 10; 35 25]; lspec = lanespec(2); road(scenario,roadcenters,'Lanes',lspec);
Add a vehicle to the scenario. Set a trajectory in which the vehicle drives around the curve at varying speeds.
v = vehicle(scenario,'ClassID',1);
waypoints = [6 2; 18 4; 25 7; 28 10; 31 15; 33 22];
speeds = [30 10 5 5 10 30];
trajectory(v,waypoints,speeds)
Plot the scenario and run the simulation. Observe how the vehicle slows down as it drives along the curve.
plot(scenario,'Waypoints','on','RoadCenters','on') while advance(scenario) pause(0.1) end

Create a driving scenario consisting of two, two-lane roads that intersect at a right angle.
scenario = drivingScenario('StopTime',2.75); roadCenters = [50 1 0; 2 0.9 0]; laneSpecification = lanespec(2,'Width',4); road(scenario,roadCenters,'Lanes',laneSpecification); roadCenters = [27 24 0; 27 -21 0]; road(scenario,roadCenters,'Lanes',laneSpecification);
Add an ego vehicle to the scenario. Specify the waypoints and the speed values for the vehicle at each waypoint. Set a wait time for the vehicle at the second waypoint. Generate a trajectory in which the ego vehicle travels through the specified waypoints at the specified speed.
egoVehicle = vehicle(scenario,'ClassID',1,'Position',[5 -1 0]); waypoints = [5 -1 0; 16 -1 0; 40 -1 0]; speed = [30; 0; 30]; waittime = [0; 0.3; 0]; trajectory(egoVehicle,waypoints,speed,waittime);
Add a car to the scenario. Specify the waypoints and the speed values for the car at each waypoint. Set a wait time for the car at the second waypoint. Generate a trajectory in which the car travels through the specified waypoints at the specified speed.
car = vehicle(scenario,'ClassID',1,'Position',[48 4 0],'PlotColor',[0.494 0.184 0.556], 'Name','Car'); waypoints = [47 3 0; 38 3 0; 10 3 0]; speed = [30; 0; 30]; waittime = [0; 0.3; 0]; trajectory(car,waypoints,speed,waittime);
Add an ambulance to the scenario. Generate a trajectory in which the ambulance travels through the specified waypoints at a constant speed.
ambulance = vehicle(scenario,'ClassID',6,'Position',[25 22 0],'PlotColor',[0.466 0.674 0.188],'Name','Ambulance');
Warning: Class ID 6 is not supported for a vehicle. The drivingScenario object created an actor instead. ClassID of vehicle must be one of these values: 1 (Car) or 2 (Truck).
waypoints = [25 22 0; 25 13 0; 25 6 0; 26 2 0; 33 -1 0; 45 -1 0]; speed = 25; trajectory(ambulance,waypoints,speed);
Create a custom figure window to plot the scenario.
fig = figure; set(fig,'Position',[0,0,800,600]); movegui(fig,'center'); hViewPnl = uipanel(fig,'Position',[0 0 1 1],'Title','Stop-and-Go Scenario'); hPlt = axes(hViewPnl);
Plot the scenario and run the simulation. The ego vehicle and the car pause for their specified wait times to avoid collision with the ambulance.
plot(scenario,'Waypoints','on','RoadCenters','on','Parent',hPlt) while advance(scenario) pause(0.1) end

Simulate a driving scenario in which a car drives in reverse to back into a parking space.
Create a driving scenario containing a parking lot.
scenario = drivingScenario; vertices = [0 9; 18 9; 18 -9; 0 -9]; parkingLot(scenario,vertices,ParkingSpace=parkingSpace);
Create a car and define its trajectory. The car drives forward, stops, and then drives in reverse to back into the parking space. As the car enters the parking space, it has a yaw orientation angle that is 90 degrees counterclockwise from where it started.
car = vehicle(scenario,ClassID=1); waypoints = [9 -5; 9 5; 6 -1.3; 2 -1.3]; speed = [3; 0; -2; 0]; yaw = [90 90 180 180]; smoothTrajectory(car,waypoints,speed,Yaw=yaw)
Plot the driving scenario and display the waypoints of the trajectory.
plot(scenario,Waypoints="on") while advance(scenario) pause(scenario.SampleTime) end

Define the trajectory of a pedestrian who takes a sharp right turn at an intersection.
Create a driving scenario. Add road segments that define an intersection.
scenario = drivingScenario; roadCenters = [0 10; 0 -10]; road(scenario,roadCenters); road(scenario,flip(roadCenters,2));
Add a pedestrian actor to the scenario.
pedestrian = actor(scenario, ... 'ClassID',4, ... 'Length',0.24, ... 'Width',0.45, ... 'Height',1.7, ... 'Position',[-9 0 0], ... 'RCSPattern',[-8 -8; -8 -8], ... 'Mesh', driving.scenario.pedestrianMesh, ... 'Name','Pedestrian');
Define the trajectory of the pedestrian. The pedestrian approaches the intersection, pauses briefly, and then takes a sharp right turn at the intersection. To define the sharp right turn, specify two waypoints at the intersection that are close together. For these waypoints, specify the yaw orientation angle of the second waypoint at a 90-degree angle from the first waypoint.
waypoints = [-9 0; -0.25 0; 0 -0.25; 0 -9];
speed = [1.5; 0; 0.5; 1.5];
yaw = [0; 0; -90; -90];
waittime = [0; 0.2; 0; 0];
trajectory(pedestrian,waypoints,speed,waittime,'Yaw', yaw);
Plot the driving scenario and display the waypoints of the pedestrian.
plot(scenario,'Waypoints','on') while advance(scenario) pause(0.001) end

Since R2024b
Create a driving scenario object.
scenario = drivingScenario;
Add road and lane segments to the driving scenario.
roadCenters = [18.3 17.94 0;
34.8 0.45 0;
19.1 -21.74 0];
laneSpecification = lanespec(2,Width=5);
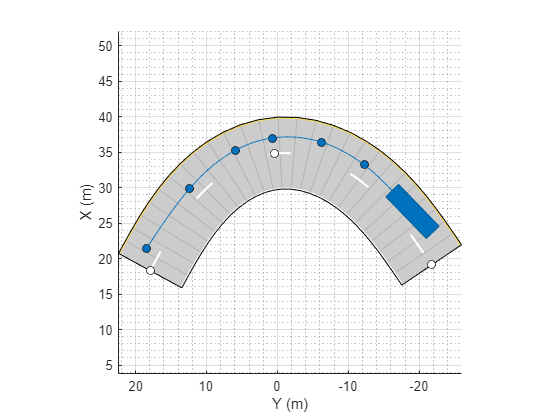
road(scenario,roadCenters,Lanes=laneSpecification,Name="Road")Add a vehicle to the scenario with waypoints and the corresponding times of actor arrival. Create a trajectory using the actor arrival times.
egoVehicle = vehicle(scenario, ... ClassID=2, ... Length=8.2, ... Width=2.5, ... Height=3.5, ... Position=[21.4185032445924 18.4409098505372 0.01], ... RearOverhang=1, ... FrontOverhang=0.9, ... Mesh=driving.scenario.truckMesh, ... Name="Truck"); waypoints = [21.4185032445924 18.4409098505372 0.01; 29.9 12.34 0.01; 35.3 5.85 0.01; 36.99 0.75 0.01; 36.4 -6.25 0.01; 33.2 -12.24 0.01; 28.6 -17.14 0.01]; actorArrivalTime = [0 0.2 0.5 0.8 1 1.3 1.5]'; trajectory(egoVehicle,waypoints,TimeOfArrival=actorArrivalTime)
Plot the scenario, and run the simulation.
plot(scenario,Waypoints="on",RoadCenters="on") while advance(scenario) pause(0.1) end
Since R2024b
Create a driving scenario object.
scenario1 = drivingScenario(StopTime=1.25);
Add road and lane segments to the driving scenario.
laneSpecification = lanespec(2,Width=5);
roadCenters = [27 24 0;
27 -3 0;
47 16 0];
road(scenario1,roadCenters,Lanes=laneSpecification);Specify the vehicle parameters, along with its waypoints and relative speed values.
egoCar1 = vehicle(scenario1,ClassID=1,Position=[22 19 0], ... PlotColor=[0.494 0.184 0.556],Name="Car1",Length=10,FrontOverhang=1.8); waypoints = [22 19 0; 19 13 0; 19 6 0; 20 2 0; 33 -6 0; 48 10 0]; speed = 25;
Create a trajectory for the vehicle, with reference to the front-axle for steering.
trajectory(egoCar1,waypoints,speed,ReferenceSteerPosition="front-axle")Create an another driving scenario object.
scenario2 = drivingScenario(StopTime=1.25);
Add the same road and lane segments to the driving scenario which you added to the previous driving scenario.
road(scenario2,roadCenters,Lanes=laneSpecification);
Specify the same vehicle parameters, along with its waypoints and relative speed values which you added to the previous driving scenario.
egoCar2 = vehicle(scenario2,ClassID=1,Position=[22 19 0], ... PlotColor=[0.466 0.674 0.188],Name="Car2",Length=10,FrontOverhang=1.8);
Create a trajectory for the vehicle, with reference to the default rear-axle for steering.
trajectory(egoCar2,waypoints,speed)
Plot and simulate the scenarios, displaying the front-axle and rear-axle trajectories. Observe the first subplot contains a dashed line trajectory for the rear axle, created with reference to the front-axle steering.
fig = figure(Visible="on"); % Ensure the figure is visible axesWidth = 0.35; % Relative width of each axes axesHeight = 0.8; % Relative height of each axes margin = 0.1; % Margin from left/right and between axes % Calculate axes positions of each subplot for equal spacing pos1 = [margin 0.1 axesWidth axesHeight]; pos2 = [1-(margin+axesWidth) 0.1 axesWidth axesHeight]; % Specify title to the first axes in the figure ax1 = axes(fig,Position=pos1); title(ax1,"Trajectory with Front-Axle Steering") % Specify title to the second axes in the figure ax2 = axes(fig,Position=pos2); title(ax2,"Trajectory with Rear-Axle Steering") % Plot and simulate the scenarios plot(scenario1,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax1) plot(scenario2,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax2) while advance(scenario1) && advance(scenario2) pause(0.1) end

Input Arguments
Name-Value Arguments
Limitations
If you create a
drivingScenarioobject containing trajectory for a vehicle with front axle steering and import it into the Driving Scenario Designer app, the app represents it as a scenario with rear axle trajectory.If the input
drivingScenarioobject contains trajectory for a vehicle with front axle steering and import it into RoadRunner using thestartRoadRunnerForScenariofunction, the RoadRunner scenario represents that vehicle trajectory with steering located at the center of that vehicle.
Tips
To get the position of the vehicle with reference to a specific vehicle body location, use the
getReferencePositionfunction.If a driving scenario contains a front-axle trajectory for at least one vehicle, you can get the front-axle position from the
FrontAxlePositionfield of theActorPosesstructure returned by therecordfunction.If a driving scenario contains a front-axle trajectory, to plot both the rear-axle and front-axle trajectories, specify the
ShowRearAxlename-value argument of theplotfunction as"on".
Algorithms
The trajectory function creates a trajectory for an actor to
follow in a scenario. A trajectory consists of the path followed by an object and its
speed along the path. You specify the path using N two-dimensional or
three-dimensional waypoints. Each of the N – 1 segments between
waypoints defines a curve whose curvature varies linearly with distance along the
segment. The function fits a piecewise clothoid curve to the
(x, y) coordinates of the waypoints by
matching the curvature on both sides of the waypoint. For a nonclosed curve, the
curvature at the first and last waypoint is zero. If the first and last waypoints
coincide, then the curvatures before and after the endpoints are matched. The
z-coordinates of the trajectory are interpolated using a
shape-preserving piecewise cubic curve.
The generated trajectory results in a piecewise constant-acceleration profile for each
segment between waypoints. These segments have acceleration discontinuities between
them. To avoid discontinuities in acceleration, use the smoothTrajectory function to generate trajectories instead.